Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
6.2 Flowing Light¶
Have you ever wanted to add some fun and interactive element to your living space? This project involves creating a running light using WS2812 LED strip and a obstacle avoidance module. The running light changes direction when an obstacle is detected, making it an exciting addition to your home or office decor.
Required Components
In this project, we need the following components.
It’s definitely convenient to buy a whole kit, here’s the link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
ESP32 Starter Kit |
320+ |
You can also buy them separately from the links below.
COMPONENT INTRODUCTION |
PURCHASE LINK |
|---|---|
Schematic Diagram
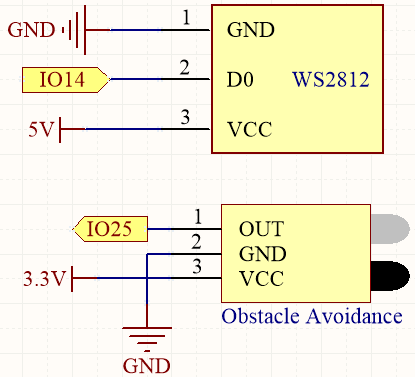
The WS2812 LED strip is composed of a series of individual LEDs that can be programmed to display different colors and patterns. In this project, the strip is set up to display a running light that moves in a particular direction and changes direction when an obstacle is detected by the obstacle avoidance module.
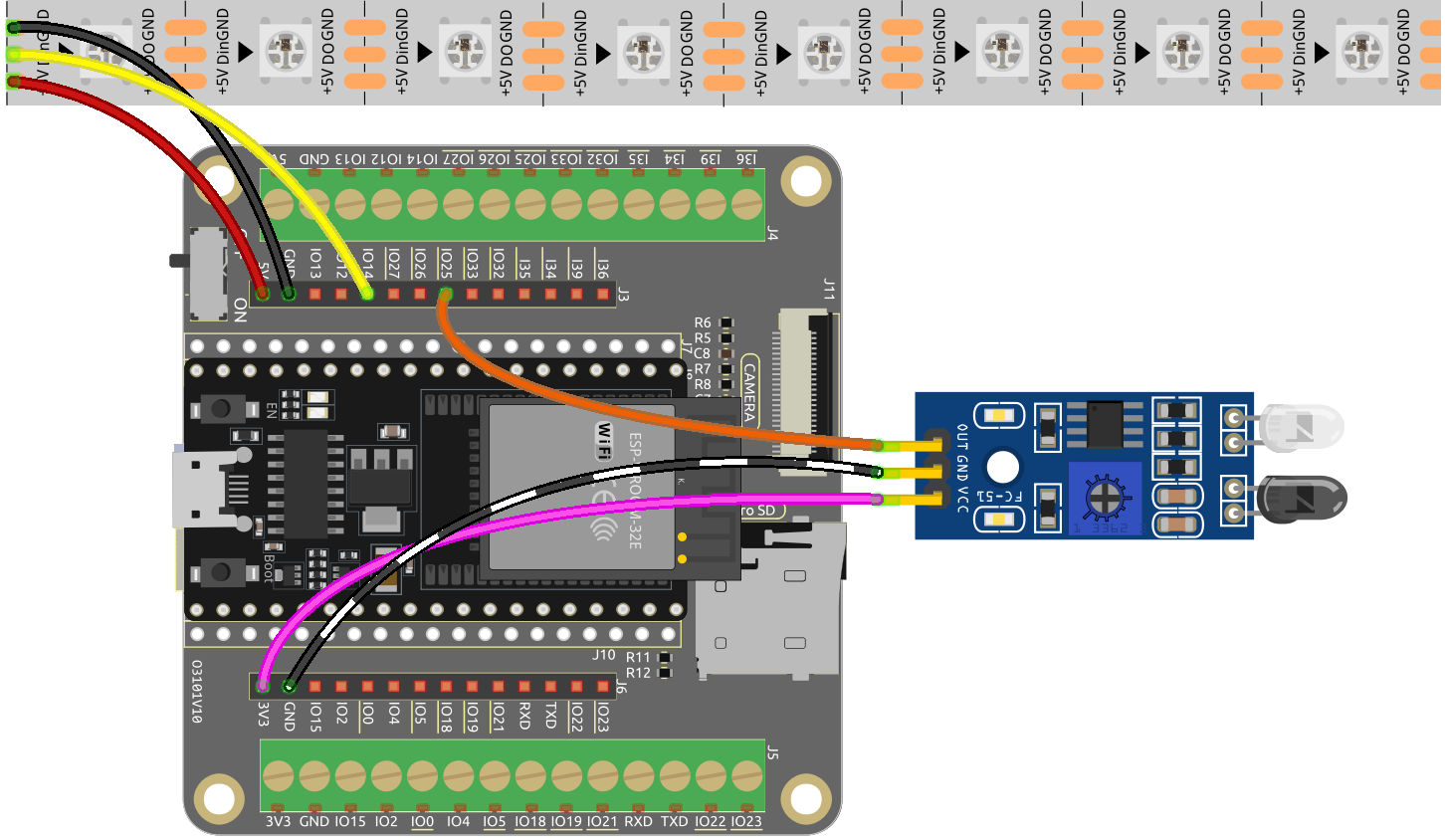
Wiring
Code
Note
Open the
6.2_flowing_led.pyfile located in theesp32-starter-kit-main\micropython\codespath, or copy and paste the code into Thonny. Then, click “Run Current Script” or press F5 to execute it.Make sure to select the “MicroPython (ESP32).COMxx” interpreter in the bottom right corner.
from machine import Pin
import neopixel
import time
import random
# Set the number of pixels for the running light
num_pixels = 8
# Set the data pin for the RGB LED strip
data_pin = Pin(14, Pin.OUT)
# Initialize the RGB LED strip object
pixels = neopixel.NeoPixel(data_pin, num_pixels)
# Initialize the avoid sensor
avoid = Pin(25, Pin.IN)
# Initialize the direction variable
direction_forward = True
# Initialize the reverse direction flag
reverse_direction = False
# Continuously loop the running light
while True:
# Read the input from the infrared sensor
avoid_value = avoid.value()
# Generate a random color for the current pixel
color = (random.randint(0, 255), random.randint(0, 255), random.randint(0, 255))
# If no obstacle is detected
if avoid_value:
for i in range(num_pixels):
# Turn on the current pixel with the random color
pixels[i] = color
# Update the RGB LED strip display
pixels.write()
# Turn off the current pixel
pixels[i] = (0, 0, 0)
time.sleep_ms(100)
# If detects an obstacle, change the direction of the LED strip
else:
for i in range(num_pixels-1, -1, -1):
pixels[i] = color
pixels.write()
pixels[i] = (0, 0, 0)
time.sleep_ms(100)
LEDs on the RGB Strip light up one by one when the script runs. As soon as an object is placed in front of the obstacle avoidance module, the LEDs on the RGB Strip light up one by one in the opposite direction.