注釈
FacebookにあるSunFounder Raspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Raspberry Pi、Arduino、ESP32に関する知識を深め、仲間たちと共に探求しましょう。
なぜ参加するのか?
専門サポート: コミュニティやチームからの支援を受けながら、販売後の問題や技術的な課題を解決します。
学びと共有: スキル向上のためのヒントやチュートリアルを交換しましょう。
独占プレビュー: 新製品発表や先行公開へのアクセスが可能です。
特別割引: 最新製品の独占割引を楽しんでください。
祭りプロモーションとギフト: ギフトやホリデープロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造してみませんか?[こちら]をクリックして今すぐ参加しましょう!
サーボモーター

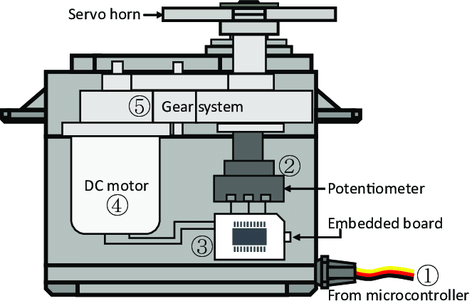
サーボモーターは、通常、ケース、シャフト、ギアシステム、ポテンショメーター、DCモーター、内蔵ボードから構成されます。
動作原理は次の通りです:マイクロコントローラーがPWM信号をサーボに送信し、その信号がサーボ内の内蔵ボードによって受信され、モーターの回転が制御されます。その結果、モーターはギアシステムを介してシャフトを減速後に動かし、シャフトはポテンショメーターと接続されているため、シャフトの回転によりポテンショメーターから電圧信号が出力され、内蔵ボードが現在の位置に基づいて回転方向と速度を判断し、定義された正確な位置で停止し維持することができます。
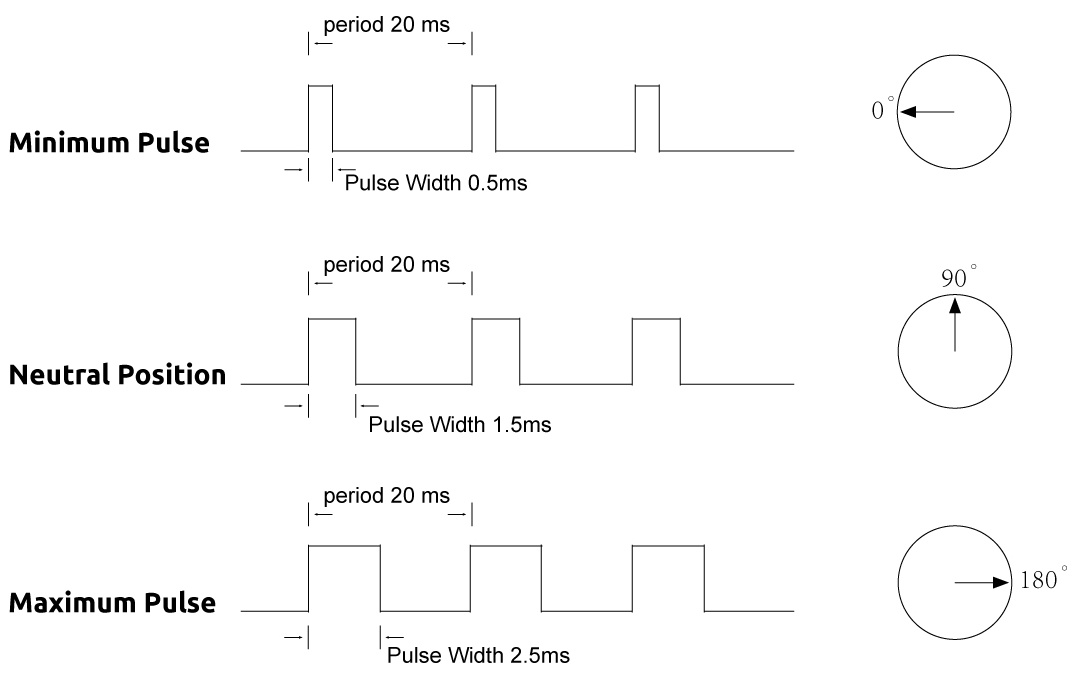
制御線に適用されるパルスの持続時間によって角度が決まります。これをパルス幅変調と呼びます。 サーボは20msごとにパルスを受け取ることを期待しています。パルスの長さがモーターの回転角度 を決定します。たとえば、1.5msのパルスはモーターを90度の位置(ニュートラル位置)に回転させます。 1.5ms未満のパルスがサーボに送られると、サーボは反時計回りに角度を持ってその位置でシャフトを保持します。 パルスが1.5msを超えると反対が起こります。各サーボによって異なる有効な位置に回転させるための最小パルス幅 と最大パルス幅は、通常、最小が約0.5ms、最大が2.5msです。
例
3.7 サーボモーターの動作 (MicroPythonユーザー用)
7.11 ソマトセンサリーコントローラーの構築 (MicroPythonユーザー用)
3.7 サーボモーターのスイング (Arduinoユーザー用)