注釈
FacebookでのSunFounder Raspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Raspberry Pi、Arduino、ESP32について熱心な仲間たちとさらに深く掘り下げましょう。
参加する理由
専門的サポート: コミュニティとチームの支援により、販売後の問題や技術的な課題を解決します。
学びと共有: ヒントやチュートリアルを交換して、スキルを向上させましょう。
独占的プレビュー: 新製品の発表やスニークピークに早期アクセスが可能です。
特別割引: 最新製品の独占割引をお楽しみください。
お祭りプロモーションとギブアウェイ: ギブアウェイやホリデープロモーションに参加しましょう。
👉 私たちと一緒に探検し、創造しませんか?[こちら]をクリックして今日参加しましょう!
MPU6050モジュール
MPU6050
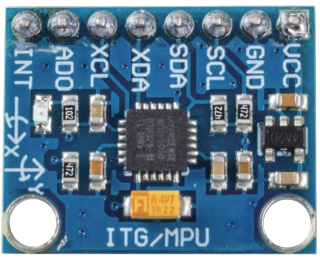
MPU-6050は、3軸ジャイロスコープと3軸加速度計を組み合わせた6軸モーショントラッキングデバイスです。
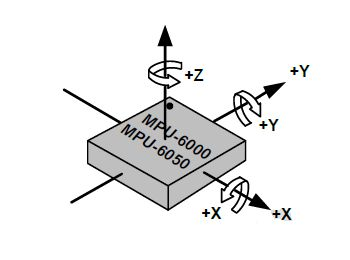
以下のように三つの座標系が定義されています:
MPU6050をテーブルの上に平らに置き、ラベルが上向きになるようにし、この面の左上の角 にドットがある場合、上向きの方向がチップのz軸です。左から右への方向がX軸と見なされ、 それに応じて後ろから前への方向がY軸と定義されます。
3軸加速度計
加速度計は圧電効果の原理、つまり一定の材料が機械的ストレスに応じて電荷を発生させる能力に 基づいて動作します。
ここで、内部に小さな球が入っている立方体の箱を想像してください。箱の壁は圧電結晶でできています。 箱を傾けると、重力のために球は傾斜の方向に動かされます。球が衝突する壁は、微小な圧電電流を生成します。 立方体には反対側の壁が3組あり、各組は3D空間のX、Y、Z軸に対応します。壁から生成される電流に応じて、 傾斜の方向とその大きさを判断することができます。
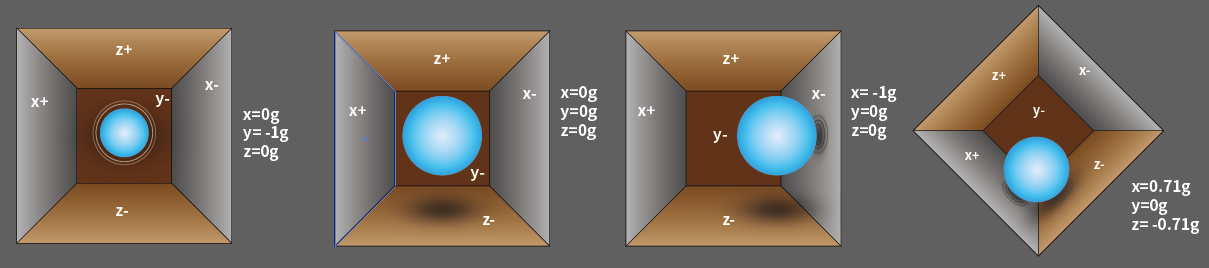
MPU6050を使用して、各座標軸の加速度を検出することができます(静止状態のデスクトップで、 Z軸の加速度は重力単位で1、X軸とY軸は0です)。傾斜しているか、無重力/過重状態にある場合、 対応する読み取り値が変化します。
プログラムで選択できる4種類の測定範囲があります:+/-2g、+/-4g、+/-8g、+/-16g(デフォルトは2g) で、値は-32768から32767までの範囲です。
加速度計の読み取りは、読み取り範囲から測定範囲に読み取りをマッピングすることによって加速度値に変換されます。
加速度 = (加速度計軸の生データ / 65536 * 全スケール加速度範囲) g
例としてX軸を挙げると、加速度計X軸の生データが16384で、範囲が+/-2gに選択されている場合:
X軸の加速度 = (16384 / 65536 * 4) g =1g
3軸ジャイロスコープ
ジャイロスコープはコリオリ加速度の原理に基づいて動作します。 バックアンドフォースモーションの定数で動くフォークのような構造があり、 それは圧電結晶を使用して固定されています。この配置を傾けようとすると、 傾斜の方向に力を感じる結晶が生じます。これは動いているフォークの慣性の結果です。 したがって、これらの結晶は圧電効果に応じて電流を生成し、この電流は増幅されます。

ジャイロスコープには、+/- 250、+/- 500、+/- 1000、+/- 2000の4種類の測定範囲があります。 計算方法と加速度は基本的に一致しています。
読み取りを角速度に変換する式は以下の通りです:
角速度 = (ジャイロスコープ軸の生データ / 65536 * 全スケールジャイロスコープ範囲) °/s
例えばX軸で、加速度計X軸の生データが16384で、範囲が+/-250°/sの場合:
X軸の角速度 = (16384 / 65536 * 500)°/s =125°/s
例
6.3 MPU-6050からのデータ読み取り (MicroPythonユーザー向け)
7.11 ソマトセンサリーコントローラーの構築 (MicroPythonユーザー向け)
7.12 デジタル水準器の作成 (MicroPythonユーザー向け)
6.3 MPU-6050から読み取る (Arduinoユーザー向け)