Nota
¡Hola, bienvenido a la Comunidad de Aficionados a Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Profundiza en Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte de expertos: Resuelve problemas posventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprender y compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Vistas previas exclusivas: Obtén acceso anticipado a anuncios de nuevos productos y avances.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más nuevos.
Promociones festivas y sorteos: Participa en sorteos y promociones de fiestas.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy!
5.5 Detección de Movimiento Humano¶
El sensor infrarrojo pasivo (sensor PIR) es un sensor común que puede medir la luz infrarroja (IR) emitida por objetos en su campo de visión. En términos simples, recibe la radiación infrarroja emitida por el cuerpo, detectando así el movimiento de personas y otros animales. Más específicamente, le indica a la placa de control principal que alguien ha entrado a su habitación.
Componentes Requeridos
Para este proyecto, necesitamos los siguientes componentes.
Es definitivamente conveniente comprar un kit completo, aquí está el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit de Inicio ESP32 |
320+ |
También puede comprarlos por separado en los enlaces a continuación.
INTRODUCCIÓN DEL COMPONENTE |
ENLACE DE COMPRA |
|---|---|
Pines Disponibles
Pines Disponibles
Aquí hay una lista de pines disponibles en la placa ESP32 para este proyecto.
Para Entrada
IO13, IO14, IO27, IO26, IO25, IO33, I35, I34, I39, I36, IO4, IO18, IO19, IO21, IO22, IO23
Para Salida
IO13, IO12, IO14, IO27, IO26, IO25, IO33, IO32, IO15, IO2, IO0, IO4, IO5, IO18, IO19, IO21, IO22, IO23
Nota
El pin IO32 no se puede usar como pin de entrada en este proyecto porque está internamente conectado a una resistencia de pull-down de 1K, lo que establece su valor predeterminado en 0.
Pines de Strapping (Entrada)
Los pines de strapping son un conjunto especial de pines que se utilizan para determinar modos de arranque específicos durante el inicio del dispositivo (es decir, reseteo por encendido).
Pines de Strapping
IO5, IO0, IO2, IO12, IO15
Generalmente, no se recomienda usarlos como pines de entrada. Si desea usar estos pines, considere el impacto potencial en el proceso de arranque. Para más detalles, por favor refiérase a la sección Pines de Estrapeo.
Esquemático
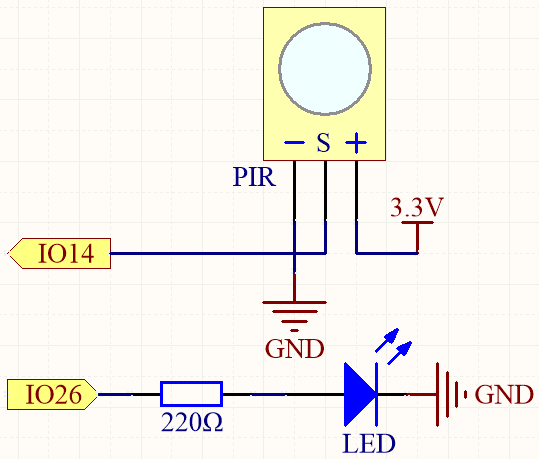
Cuando el módulo PIR detecta movimiento, IO14 se activará, y el LED se encenderá. De lo contrario, cuando no se detecta movimiento, IO14 estará bajo, y el LED se apagará.
Nota
El módulo PIR tiene dos potenciómetros: uno ajusta la sensibilidad, el otro ajusta la distancia de detección. Para que el módulo PIR funcione mejor, necesita girar ambos en sentido antihorario hasta el final.

Conexión

Código
Nota
Abra el archivo
5.5_detect_human_movement.pyubicado en la rutaesp32-starter-kit-main\micropython\codeso copie y pegue el código en Thonny. Luego, haga clic en «Ejecutar script actual» o presione F5 para ejecutarlo.Asegúrese de seleccionar el intérprete «MicroPython (ESP32).COMxx» en la esquina inferior derecha.
import machine
import time
# Define pins
PIR_PIN = 14 # PIR sensor
LED_PIN = 26 # LED
# Initialize the PIR sensor pin as an input pin
pir_sensor = machine.Pin(PIR_PIN, machine.Pin.IN, machine.Pin.PULL_DOWN)
# Initialize the LED pin as an output pin
led = machine.Pin(LED_PIN, machine.Pin.OUT)
# Global flag to indicate motion detected
motion_detected_flag = False
# Function to handle the interrupt
def motion_detected(pin):
global motion_detected_flag
print("Motion detected!")
motion_detected_flag = True
# Attach the interrupt to the PIR sensor pin
pir_sensor.irq(trigger=machine.Pin.IRQ_RISING, handler=motion_detected)
# Main loop
while True:
if motion_detected_flag:
led.value(1) # Turn on the LED
time.sleep(5) # Keep the LED on for 5 seconds
led.value(0) # Turn off the LED
motion_detected_flag = False
Cuando el script esté ejecutándose, el LED se encenderá durante 5 segundos y luego se apagará cuando el módulo PIR detecte a alguien pasando.
Nota
El módulo PIR tiene dos potenciómetros: uno ajusta la sensibilidad, el otro ajusta la distancia de detección. Para que el módulo PIR funcione mejor, necesita girar ambos en sentido antihorario hasta el final.
¿Cómo funciona?
Este código establece un sistema simple de detección de movimiento usando un sensor PIR y un LED. Cuando se detecta movimiento, el LED se encenderá durante 5 segundos.
Aquí hay un desglose del código:
Definir la función del manejador de interrupción que se ejecutará cuando se detecte movimiento:
def motion_detected(pin): global motion_detected_flag print("Motion detected!") motion_detected_flag = True
Adjuntar la interrupción al pin del sensor PIR, con el disparador establecido en «ascendente» (es decir, cuando el pin pasa de un voltaje bajo a alto):
pir_sensor.irq(trigger=machine.Pin.IRQ_RISING, handler=motion_detected)
Esto configura una interrupción en el pin
pir_sensor, que está conectado al sensor de movimiento PIR.Aquí hay una explicación detallada de los parámetros:
trigger=machine.Pin.IRQ_RISING: Este parámetro establece la condición de disparo para la interrupción. En este caso, la interrupción se disparará en un borde ascendente. Un borde ascendente es cuando el voltaje en el pin cambia de un estado bajo (0V) a un estado alto (típicamente 3.3V o 5V, dependiendo de su hardware). Para un sensor de movimiento PIR, cuando se detecta movimiento, el pin de salida generalmente pasa de bajo a alto, haciendo que el borde ascendente sea una condición de disparo adecuada.handler=motion_detected: Este parámetro especifica la función que se ejecutará cuando se dispare la interrupción. En este caso, la funciónmotion_detectedse proporciona como el manejador de interrupción. Esta función será llamada automáticamente cuando se detecte la condición de interrupción (borde ascendente) en el pinpir_sensor.
Entonces, esta línea de código configura el sensor PIR para llamar a la función
motion_detectedsiempre que el sensor detecte movimiento, debido a que el pin de salida pasa de un estado bajo a un estado alto.En el bucle principal, si la
motion_detected_flagse establece enTrue, el LED se encenderá durante 5 segundos y luego se apagará. La bandera luego se restablece aFalsepara esperar el próximo evento de movimiento.while True: if motion_detected_flag: led.value(1) # Turn on the LED time.sleep(5) # Keep the LED on for 5 seconds led.value(0) # Turn off the LED motion_detected_flag = False