Nota
¡Hola, bienvenido a la Comunidad de Aficionados a Raspberry Pi, Arduino y ESP32 de SunFounder en Facebook! Profundiza en Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirse?
Soporte de expertos: Resuelve problemas posventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprender y compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Vistas previas exclusivas: Obtén acceso anticipado a anuncios de nuevos productos y avances.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más nuevos.
Promociones festivas y sorteos: Participa en sorteos y promociones de fiestas.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy!
6.2 Luz Fluyente¶
¿Alguna vez has querido añadir un elemento divertido e interactivo a tu espacio vital? Este proyecto implica crear una luz corriente usando una tira de LED WS2812 y un módulo de evitación de obstáculos. La luz corriente cambia de dirección cuando se detecta un obstáculo, convirtiéndola en una adición emocionante a tu decoración del hogar u oficina.
Componentes Necesarios
En este proyecto, necesitamos los siguientes componentes.
Es definitivamente conveniente comprar un kit completo, aquí tienes el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit de Inicio ESP32 |
320+ |
También puedes comprarlos por separado en los enlaces a continuación.
INTRODUCCIÓN DE COMPONENTES |
ENLACE DE COMPRA |
|---|---|
Diagrama Esquemático
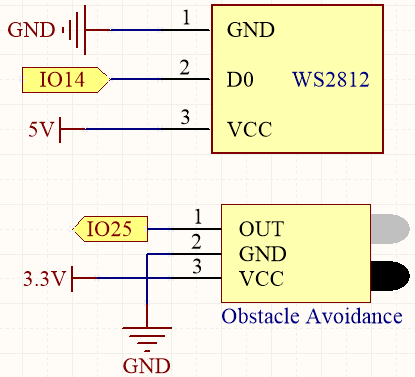
La tira de LED WS2812 está compuesta por una serie de LEDs individuales que pueden ser programados para mostrar diferentes colores y patrones. En este proyecto, la tira está configurada para mostrar una luz corriente que se mueve en una dirección particular y cambia de dirección cuando un obstáculo es detectado por el módulo de evitación de obstáculos.
Cableado

Código
Nota
Abre el archivo
6.2_flowing_led.pyubicado en la rutaesp32-starter-kit-main\micropython\codes, o copia y pega el código en Thonny. Luego, haz clic en «Ejecutar Script Actual» o presiona F5 para ejecutarlo.Asegúrate de seleccionar el intérprete «MicroPython (ESP32).COMxx» en la esquina inferior derecha.
from machine import Pin
import neopixel
import time
import random
# Set the number of pixels for the running light
num_pixels = 8
# Set the data pin for the RGB LED strip
data_pin = Pin(14, Pin.OUT)
# Initialize the RGB LED strip object
pixels = neopixel.NeoPixel(data_pin, num_pixels)
# Initialize the avoid sensor
avoid = Pin(25, Pin.IN)
# Initialize the direction variable
direction_forward = True
# Initialize the reverse direction flag
reverse_direction = False
# Continuously loop the running light
while True:
# Read the input from the infrared sensor
avoid_value = avoid.value()
# Generate a random color for the current pixel
color = (random.randint(0, 255), random.randint(0, 255), random.randint(0, 255))
# If no obstacle is detected
if avoid_value:
for i in range(num_pixels):
# Turn on the current pixel with the random color
pixels[i] = color
# Update the RGB LED strip display
pixels.write()
# Turn off the current pixel
pixels[i] = (0, 0, 0)
time.sleep_ms(100)
# If detects an obstacle, change the direction of the LED strip
else:
for i in range(num_pixels-1, -1, -1):
pixels[i] = color
pixels.write()
pixels[i] = (0, 0, 0)
time.sleep_ms(100)
Los LEDs en la Tira RGB se iluminan uno por uno cuando se ejecuta el script. Tan pronto como se coloca un objeto frente al módulo de evitación de obstáculos, los LEDs en la Tira RGB se iluminan uno por uno en la dirección opuesta.