注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ ここ]をクリックして今すぐ参加しましょう!
ステッピングモーター
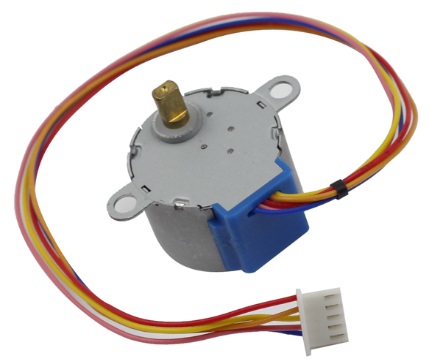
ステッピングモーターは、そのユニークな設計により、フィードバック機構がなくても高い精度で制御することができます。一連の磁石が取り付けられたステッパーのシャフトは、正確に前進または後退させるために、特定の順序で正負に充電される一連の電磁コイルによって制御されます。これにより、小さな「ステップ」で動かすことができます。
原理
ステッピングモーターには、ユニポーラタイプとバイポーラタイプの2種類があり、どちらのタイプを使用しているかを知ることが非常に重要です。この実験では、ユニポーラタイプのステッピングモーターを使用します。
ステッピングモーターは四相式で、ユニポーラリティのDC電源を使用します。モーターの全相巻線に適切なタイミングで通電すれば、ステップごとに回転させることができます。四相反応式ステッピングモーターの概略図は以下の通りです。
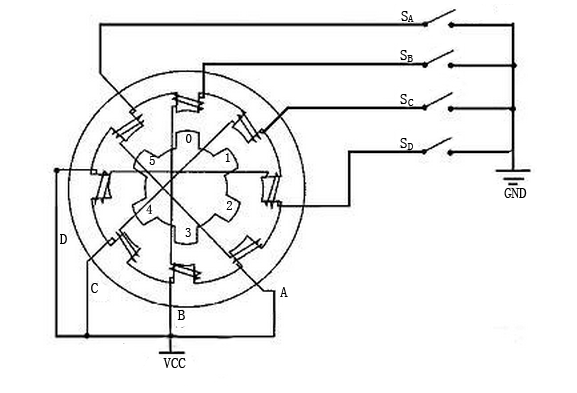
図に示すように、モーターの中心にはローターがあり、これは歯車状の永久磁石です。ローターの周りには0から5までの歯があります。さらに外側には、コイル巻線によって接続された8つの磁極があり、それぞれがAからDまでの四組のペアを形成しています。これをフェーズと呼びます。スイッチSA、SB、SC、およびSDに接続するための4つのリード線があります。したがって、回路内の4つのフェーズは並列で、1つのフェーズ内の2つの磁極は直列になっています。
四相ステッピングモーターの動作方法は次の通りです:
最初に、スイッチSBに電源を供給し、スイッチSA、SC、SDには電源を供給しません。すると、B相の磁極がローターの歯0および3に整列します。同時に、歯1および4がC相およびD相の磁極とスタッガードの歯を生成します。歯2および5がD相およびA相の磁極とスタッガードの歯を生成します。スイッチSCに電源を供給し、スイッチSB、SA、およびSDに電源を供給しないと、ローターはC相巻線の磁場および歯1および4の間の磁場によって回転します。その後、歯1および4がC相巻線の磁極に整列します。歯0および3がA相およびB相の磁極とスタッガードの歯を生成し、歯2および5がA相およびD相の磁極とスタッガードの歯を生成します。このような状況が繰り返されます。A、B、C、およびD相を順番に通電すると、ローターはA、B、C、およびDの順序で回転します。
四相ステッピングモーターには、単一四ステップ、二重四ステップ、および八ステップの3つの動作モードがあります。単一四ステップと二重四ステップのステップ角度は同じですが、単一四ステップの駆動トルクは小さいです。八ステップのステップ角度は単一四ステップおよび二重四ステップの半分です。したがって、八ステップ動作モードは、高い駆動トルクを維持し、制御精度を向上させることができます。この実験では、ステッピングモーターを八ステップモードで動作させます。
ULN2003モジュール
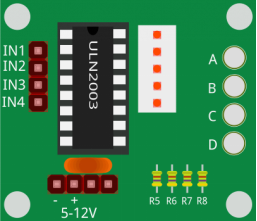
モーターを回路に適用するためには、ドライバーボードが必要です。ステッピングモータードライバーULN2003は7チャンネルのインバータ回路です。つまり、入力端がハイレベルの場合、ULN2003の出力端はローレベルになり、その逆も同様です。IN1にハイレベルを供給し、IN2、IN3、IN4にローレベルを供給すると、出力端OUT1はローレベルになり、他の出力端はすべてハイレベルになります。したがって、D1が点灯し、スイッチSAがオンになり、ステッピングモーターは1ステップ回転します。このような状況が繰り返されます。したがって、ステッピングモーターに特定のタイミングシーケンスを与えると、ステップごとに回転します。ここでのULN2003は、ステッピングモーターに特定のタイミングシーケンスを提供するために使用されます。
例
ステッピングモーター (基本プロジェクト)
アクセスコントロールシステム (楽しいプロジェクト)