注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 愛好者コミュニティ (Facebook) へようこそ! Raspberry Pi、Arduino、ESP32 を仲間と共にさらに深く学びましょう。
参加する理由
専門サポート: 購入後の問題や技術的課題をコミュニティとチームで解決
学びと共有: ヒントや学習資料を交換し、技術力を向上
限定プレビュー: 新製品情報や先行発表に早期アクセス
特別割引: 新製品を特別価格で購入可能
イベントと景品企画: 景品イベントや季節ごとのキャンペーンに参加
👉 一緒に探求し、ものづくりを楽しみましょう。[ここ] をクリックして参加!
4.1.10 過熱監視装置 (MCP3008)
注釈

キットのバージョンに応じて ADC0834 または MCP3008 が含まれています。 お手持ちのバージョンに対応する章をご参照ください。
概要
工場などで回路が過熱したときに警報を鳴らし、機械を自動的に停止させたい場合があります。 このプロジェクトでは、サーミスタ・ジョイスティック・ブザー・LED・LCD を用いてしきい値を調整できるスマート温度監視装置を作ります。
必要な部品
このプロジェクトで必要な部品は以下の通りです。
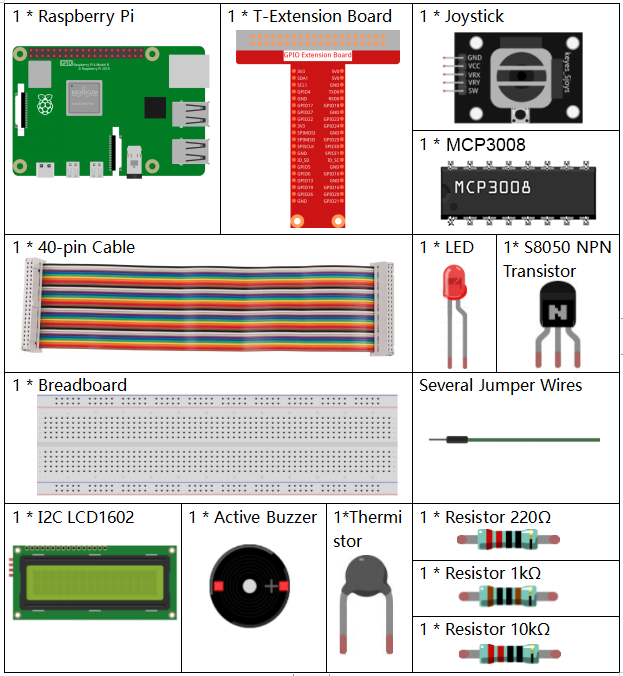
キット一式で購入すると便利です。リンクはこちら:
名称 |
キット内数量 |
リンク |
|---|---|---|
Raphael Kit |
337 |
個別に購入することもできます。以下のリンクをご参照ください。
部品紹介 |
購入リンク |
|---|---|
- |
|
- |
|
- |
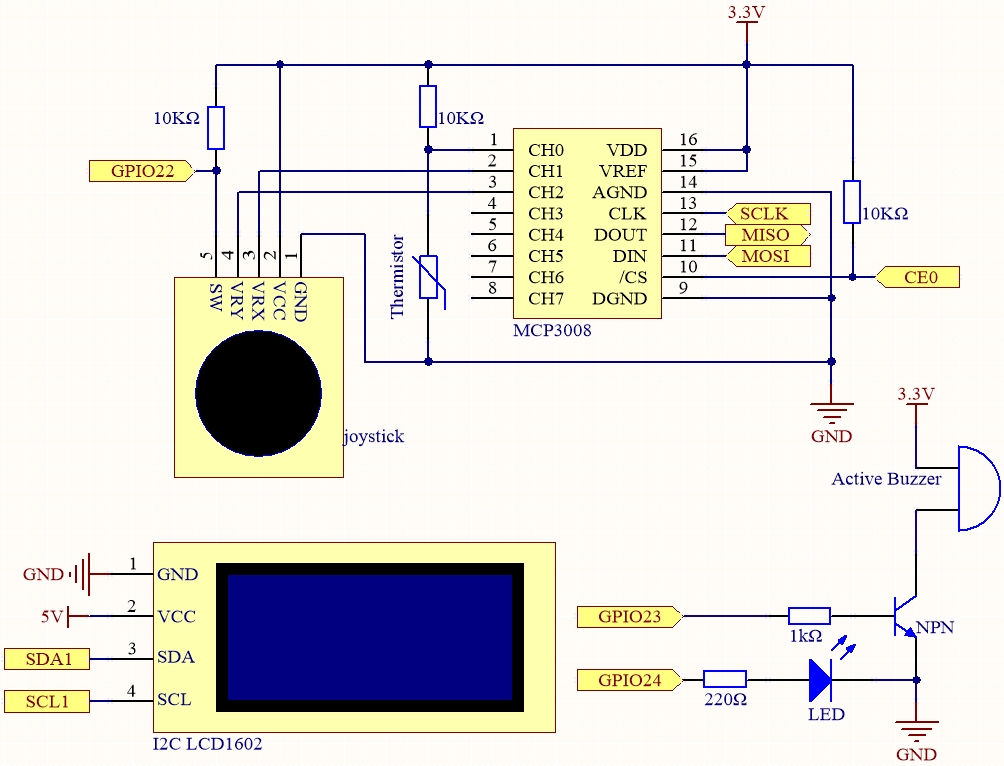
回路図
T-Board 名 |
physical |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin15 |
3 |
22 |
GPIO23 |
Pin16 |
4 |
23 |
GPIO24 |
Pin18 |
5 |
24 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
実験手順
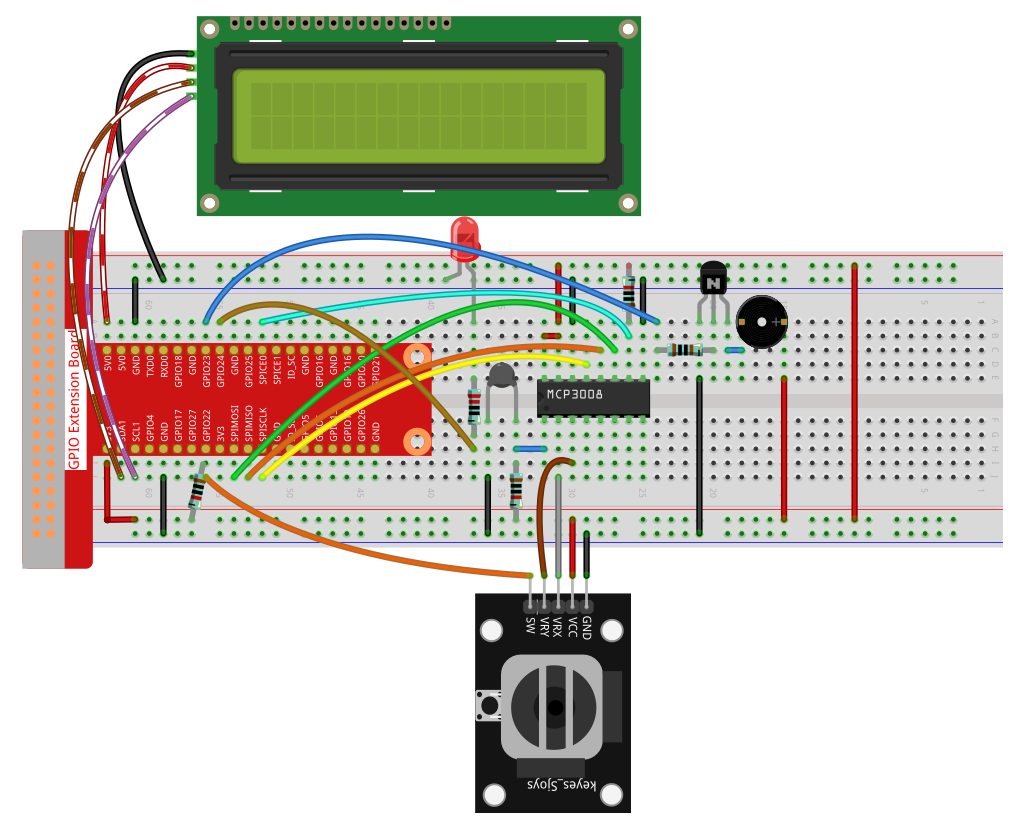
ステップ 1: 回路を組み立てます。
ステップ 2: SPIインターフェースを設定し、 spidev ライブラリをインストールします(詳細は SPI 設定 を参照)。
すでに設定済みの場合は省略可能です。
ステップ 3: コードがあるフォルダに移動します。
cd ~/raphael-kit/python-pi5
ステップ 4: 実行します。
sudo python3 4.1.13-2_OverheatMonitor_zero.py
プログラムを実行すると、現在の温度と高温しきい値(初期値 40)が I2C LCD1602 に表示されます。 現在温度がしきい値を超えるとブザーとLEDが作動して警報を発します。
ジョイスティック は高温しきい値の調整用です。X軸・Y軸方向に倒すとしきい値を増減できます。 ジョイスティックを再度押すと、しきい値は初期値にリセットされます。
注釈
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1'エラーが出た場合は I²C 設定 を参照し、I2Cを有効化してください。ModuleNotFoundError: No module named 'smbus2'エラーはsudo apt install python3-smbus2を実行してください。OSError: [Errno 121] Remote I/O errorは配線ミスまたはモジュール不良の可能性があります。配線・コードが正しくてもLCDに表示されない場合は、背面の可変抵抗を調整しコントラストを上げてください。
警告
RuntimeError: Cannot determine SOC peripheral base address エラーが出る場合は 「gpiozero」が動作しない場合。 を参照してください。
コード
注釈
以下のコードは 修正/リセット/コピー/実行/停止 が可能です。
その前に raphael-kit/python のソースコードパスに移動してください。
変更後、直接実行して結果を確認できます。
#!/usr/bin/env python3
import LCD1602
from gpiozero import LED, Buzzer, Button
import spidev
import time
import math
# Initialize joystick button, buzzer, and LED
Joy_BtnPin = Button(22) # GPIO22, Pin15
buzzPin = Buzzer(23) # GPIO23, Pin16
ledPin = LED(24) # GPIO24, Pin18
# Set initial upper temperature threshold
upperTem = 40
# Initialize SPI for MCP3008 (Bus 0, CE0 -> GPIO8 / Pin24)
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000 # 1 MHz
# Initialize LCD (I2C address 0x27, backlight on)
LCD1602.init(0x27, 1)
def read_adc(channel):
"""
Read analog value from MCP3008 (0–7)
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def get_joystick_value():
"""
Reads the joystick values and returns a change value based on the joystick's position.
"""
x_val = read_adc(1)
y_val = read_adc(2)
if x_val > 800:
return 1
elif x_val < 200:
return -1
elif y_val > 800:
return -10
elif y_val < 200:
return 10
else:
return 0
def upper_tem_setting():
"""
Adjusts and displays the upper temperature threshold on the LCD.
"""
global upperTem
LCD1602.write(0, 0, 'Upper Adjust: ')
change = int(get_joystick_value())
upperTem += change
strUpperTem = str(upperTem)
LCD1602.write(0, 1, strUpperTem)
LCD1602.write(len(strUpperTem), 1, ' ')
time.sleep(0.1)
def temperature():
"""
Reads the current temperature from the sensor and returns it in Celsius.
"""
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0 # Voltage across the fixed resistor
if Vr == 0:
return 0 # Prevent division by zero
Rt = 10000.0 * Vr / (3.3 - Vr) # Adjusted formula: thermistor voltage is (3.3 - Vr)
temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0)))
Cel = temp - 273.15
return round(Cel, 2)
def monitoring_temp():
"""
Monitors and displays the current temperature and upper temperature threshold.
Activates buzzer and LED if the temperature exceeds the upper limit.
"""
global upperTem
Cel = temperature()
LCD1602.write(0, 0, 'Temp: ')
LCD1602.write(0, 1, 'Upper: ')
LCD1602.write(6, 0, str(Cel))
LCD1602.write(7, 1, str(upperTem))
time.sleep(0.1)
if Cel >= upperTem:
buzzPin.on()
ledPin.on()
else:
buzzPin.off()
ledPin.off()
# Main execution loop
try:
lastState = 1
stage = 0
while True:
currentState = Joy_BtnPin.value
if currentState == 1 and lastState == 0:
stage = (stage + 1) % 2
time.sleep(0.1)
LCD1602.clear()
lastState = currentState
if stage == 1:
upper_tem_setting()
else:
monitoring_temp()
except KeyboardInterrupt:
LCD1602.clear()
spi.close()
コード解説
ライブラリのインポート
LCD1602は I2C 接続の LCD 用、gpiozeroはLED・ブザー・ボタン用、spidevは MCP3008 との通信、mathは温度計算、timeは遅延処理に使用。#!/usr/bin/env python3 import LCD1602 from gpiozero import LED, Buzzer, Button import spidev import time import math
GPIO 初期化
ジョイスティックボタン(GPIO22)、ブザー(GPIO23)、LED(GPIO24)を初期化。
Button(22)connects to the joystick button.Buzzer(23)andLED(24)serve as output indicators for high temperature.
Joy_BtnPin = Button(22) # GPIO22, Pin15 buzzPin = Buzzer(23) # GPIO23, Pin16 ledPin = LED(24) # GPIO24, Pin18
しきい値とデバイス初期化
初期しきい値を40℃に設定し、SPI通信と LCD を初期化。
upperTem = 40 spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000 LCD1602.init(0x27, 1)
ADC値読み取り
MCP3008 の指定チャネル(0〜7)から10ビットの値(0〜1023)を取得。
def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
ジョイスティック値取得
X軸/Y軸のアナログ値を取得し、しきい値調整量(±1 または ±10)を返す。
def get_joystick_value(): x_val = read_adc(1) y_val = read_adc(2) if x_val > 800: return 1 elif x_val < 200: return -1 elif y_val > 800: return -10 elif y_val < 200: return 10 else: return 0
しきい値調整表示
LCD に現在のしきい値を表示し、ジョイスティック操作で値を増減。
def upper_tem_setting(): global upperTem LCD1602.write(0, 0, 'Upper Adjust: ') change = int(get_joystick_value()) upperTem += change strUpperTem = str(upperTem) LCD1602.write(0, 1, strUpperTem) LCD1602.write(len(strUpperTem), 1, ' ') time.sleep(0.1)
温度計算
サーミスタから得た電圧を抵抗値に変換し、スティンハート・ハート式で摂氏温度を算出。
def temperature(): """ Reads the current temperature from the sensor and returns it in Celsius. """ analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 # Voltage across the fixed resistor if Vr == 0: return 0 # Prevent division by zero Rt = 10000.0 * Vr / (3.3 - Vr) # Adjusted formula: thermistor voltage is (3.3 - Vr) temp = 1 / (((math.log(Rt / 10000.0)) / 3950.0) + (1 / (273.15 + 25.0))) Cel = temp - 273.15 return round(Cel, 2)
監視モード
現在温度としきい値をLCDに表示し、温度超過時はブザーとLEDを作動。
def monitoring_temp(): global upperTem Cel = temperature() LCD1602.write(0, 0, 'Temp: ') LCD1602.write(0, 1, 'Upper: ') LCD1602.write(6, 0, str(Cel)) LCD1602.write(7, 1, str(upperTem)) time.sleep(0.1) if Cel >= upperTem: buzzPin.on() ledPin.on() else: buzzPin.off() ledPin.off()
メインループ
ボタン押下で「設定モード」と「監視モード」を切替。 設定モードではしきい値調整、監視モードでは温度監視を継続。
try: lastState = 1 stage = 0 while True: currentState = Joy_BtnPin.value if currentState == 1 and lastState == 0: stage = (stage + 1) % 2 time.sleep(0.1) LCD1602.clear() lastState = currentState if stage == 1: upper_tem_setting() else: monitoring_temp()
終了処理
Ctrl+C 終了時にLCDをクリアし、SPI通信を閉じて安全に終了。
except KeyboardInterrupt: LCD1602.clear() spi.close()