注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
4.1.7 スマートファン
注釈

キットのバージョンによって、 ADC0834 または MCP3008 が含まれています。 該当するセクションを選択してください。
はじめに
このプロジェクトでは、モーター、ボタン、サーミスタを使用して、風速調節可能なマニュアル+自動スマートファンを作成します。
必要な部品
このプロジェクトには、次のコンポーネントが必要です。
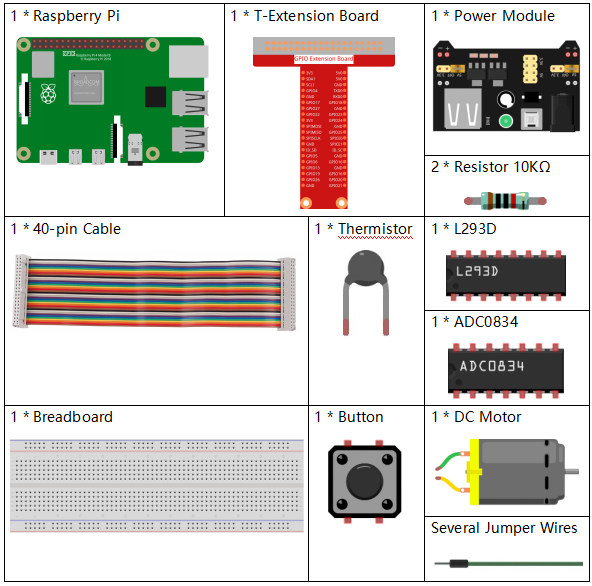
一式を購入するのが便利です、こちらがリンクです:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Raphael Kit |
337 |
以下のリンクから別々に購入することもできます。
コンポーネントの紹介 |
購入リンク |
|---|---|
- |
|
- |
|
- |
|
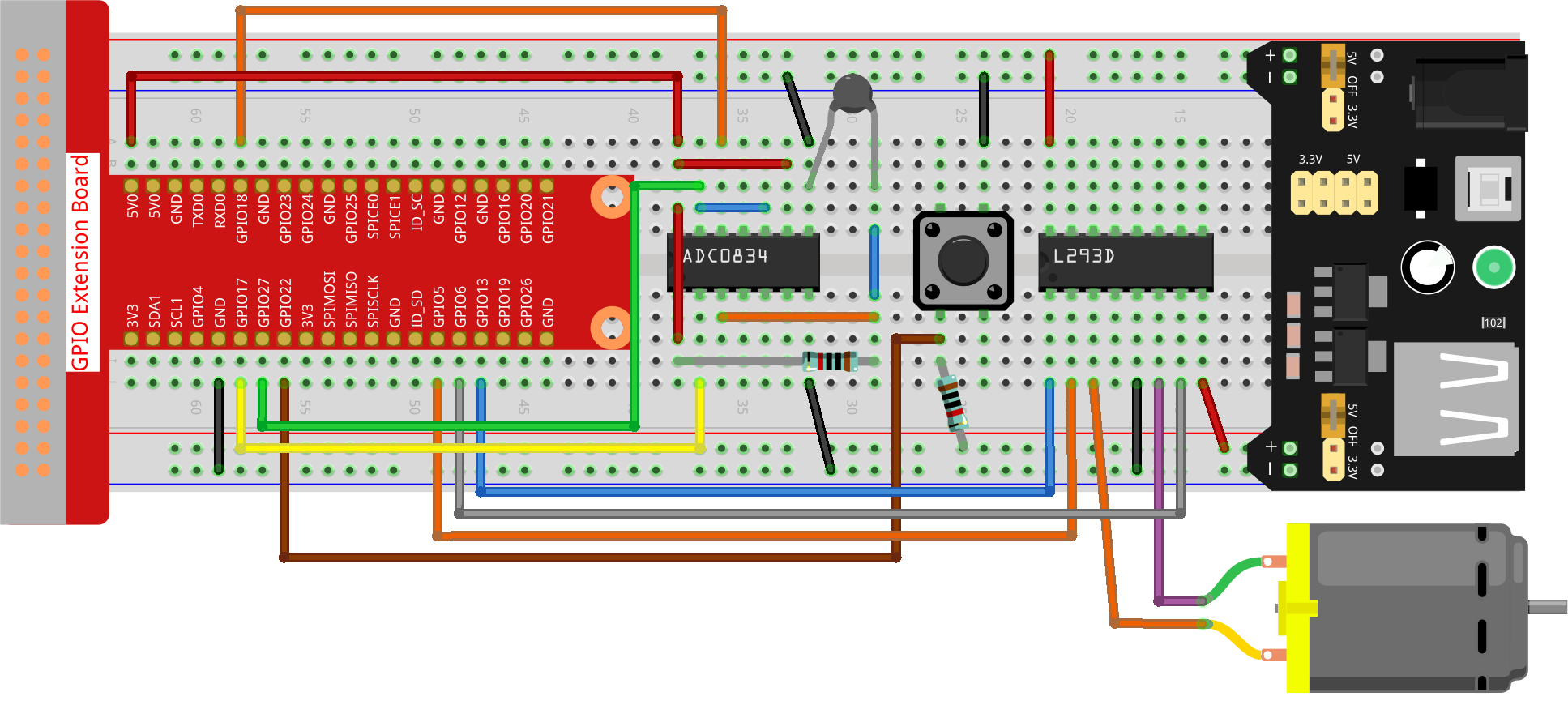
回路図
T-Board Name |
physical |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |

実験手順
ステップ1: 回路を組み立てます。
注釈
電源モジュールにはキット内の9Vバッテリーと9Vバッテリーバックルを使用できます。電源モジュールのジャンパーキャップを、ブレッドボードの5Vバスストリップに挿入します。

ステップ2: コードのフォルダに移動します。
cd ~/raphael-kit/python-pi5
ステップ3: 実行します。
sudo python3 3.1.4_SmartFan_zero.py
コードが実行されると、ボタンを押してファンを起動します。ボタンを押すたびに、風速が1段階上下に調節されます。風速は 0〜4 の 5つ の段階があります。4番目の風速に設定されており、ボタンを押すと風速 0 でファンが停止します。
温度が2℃以上上昇または下降すると、速度は自動的に1段階高くまたは低くなります。
コード
注釈
以下のコードを 変更/リセット/コピー/実行/停止 することができます。ただし、変更する前に raphael-kit/python-pi5 のようなソースコードのパスに移動する必要があります。コードを変更した後、効果を確認するために直接実行できます。
#!/usr/bin/env python3
from gpiozero import Motor, Button
from time import sleep
import ADC0834
import math
# Initialize GPIO pins for the button and motor control
BtnPin = Button(22)
motor = Motor(forward=5, backward=6, enable=13)
# Initialize the ADC0834 module for temperature sensing
ADC0834.setup()
# Initialize variables to track the motor speed level and temperatures
level = 0
currentTemp = 0
markTemp = 0
def temperature():
"""
Reads and calculates the current temperature from the sensor.
Returns:
float: The current temperature in Celsius.
"""
# Read analog value from the ADC0834 module
analogVal = ADC0834.getResult()
# Convert analog value to voltage and then to resistance
Vr = 5 * float(analogVal) / 255
Rt = 10000 * Vr / (5 - Vr)
# Calculate temperature in Celsius
temp = 1 / (((math.log(Rt / 10000)) / 3950) + (1 / (273.15 + 25)))
Cel = temp - 273.15
return Cel
def motor_run(level):
"""
Adjusts the motor speed based on the specified level.
Args:
level (int): Desired motor speed level.
Returns:
int: Adjusted motor speed level.
"""
# Stop the motor if the level is 0
if level == 0:
motor.stop()
return 0
# Cap the level at 4 for maximum speed
if level >= 4:
level = 4
# Set the motor speed
motor.forward(speed=float(level / 4))
return level
def changeLevel():
"""
Changes the motor speed level when the button is pressed and updates the reference temperature.
"""
global level, currentTemp, markTemp
print("Button pressed")
# Cycle through levels 0-4
level = (level + 1) % 5
# Update the reference temperature
markTemp = currentTemp
# Bind the button press event to changeLevel function
BtnPin.when_pressed = changeLevel
def main():
"""
Main function to continuously monitor and respond to temperature changes.
"""
global level, currentTemp, markTemp
# Set initial reference temperature
markTemp = temperature()
while True:
# Continuously read current temperature
currentTemp = temperature()
# Adjust motor level based on temperature difference
if level != 0:
if currentTemp - markTemp <= -2:
level -= 1
markTemp = currentTemp
elif currentTemp - markTemp >= 2:
if level < 4:
level += 1
markTemp = currentTemp
# Run the motor at the adjusted level
level = motor_run(level)
# Run the main function and handle KeyboardInterrupt
try:
main()
except KeyboardInterrupt:
# Stop the motor when the script is interrupted
motor.stop()
コードの説明
モーターやボタンの管理用クラス、一時停止を導入するための sleep 関数、温度センシングのための ADC0834 ライブラリ、数学的な計算のための math ライブラリをインポートします。
#!/usr/bin/env python3 from gpiozero import Motor, Button from time import sleep import ADC0834 import math
ボタンを GPIO ピン 22 に設定し、モーターの制御に特定の GPIO ピンを設定します。温度測定用に ADC0834 モジュールを初期化します。また、モーター速度レベルと温度を監視するための変数を初期化します。
# Initialize GPIO pins for the button and motor control BtnPin = Button(22) motor = Motor(forward=5, backward=6, enable=13) # Initialize the ADC0834 module for temperature sensing ADC0834.setup() # Initialize variables to track the motor speed level and temperatures level = 0 currentTemp = 0 markTemp = 0
センサーから温度を読み取り、摂氏に変換するための関数を定義します。
def temperature(): """ Reads and calculates the current temperature from the sensor. Returns: float: The current temperature in Celsius. """ # Read analog value from the ADC0834 module analogVal = ADC0834.getResult() # Convert analog value to voltage and then to resistance Vr = 5 * float(analogVal) / 255 Rt = 10000 * Vr / (5 - Vr) # Calculate temperature in Celsius temp = 1 / (((math.log(Rt / 10000)) / 3950) + (1 / (273.15 + 25))) Cel = temp - 273.15 return Cel
指定したレベルに基づいてモーターの速度を調整する関数を実装します。
def motor_run(level): """ Adjusts the motor speed based on the specified level. Args: level (int): Desired motor speed level. Returns: int: Adjusted motor speed level. """ # Stop the motor if the level is 0 if level == 0: motor.stop() return 0 # Cap the level at 4 for maximum speed if level >= 4: level = 4 # Set the motor speed motor.forward(speed=float(level / 4)) return level
ボタンを使用してモーターの速度レベルを手動で変更し、この関数をボタンのプレスイベントにバインドします。
def changeLevel(): """ Changes the motor speed level when the button is pressed and updates the reference temperature. """ global level, currentTemp, markTemp print("Button pressed") # Cycle through levels 0-4 level = (level + 1) % 5 # Update the reference temperature markTemp = currentTemp # Bind the button press event to changeLevel function BtnPin.when_pressed = changeLevel
温度変化に応じてモーターの速度を連続的に調整するメイン関数を実装することが残っています。
def main(): """ Main function to continuously monitor and respond to temperature changes. """ global level, currentTemp, markTemp # Set initial reference temperature markTemp = temperature() while True: # Continuously read current temperature currentTemp = temperature() # Adjust motor level based on temperature difference if level != 0: if currentTemp - markTemp <= -2: level -= 1 markTemp = currentTemp elif currentTemp - markTemp >= 2: if level < 4: level += 1 markTemp = currentTemp # Run the motor at the adjusted level level = motor_run(level)
メイン関数を実行し、スクリプトが中断された場合にモーターが停止することを保証する。
# Run the main function and handle KeyboardInterrupt try: main() except KeyboardInterrupt: # Stop the motor when the script is interrupted motor.stop()