Note
Bonjour, bienvenue dans la communauté des passionnés de SunFounder Raspberry Pi, Arduino et ESP32 sur Facebook ! Plongez au cœur de Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques grâce à l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des conseils et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et à des aperçus privilégiés.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et concours : Participez à des concours et des promotions durant les fêtes.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
Leçon 6 : Le module infrarouge anti-obstacle
Découvrez les « yeux » latéraux de votre rover – les capteurs infrarouges d’évitement d’obstacles !
Ces capteurs astucieux aident votre GalaxyRVR à détecter et à esquiver les obstacles sur ses côtés, comme une vision périphérique. Apprenez comment ils fonctionnent et programmez votre rover pour qu’il contourne automatiquement les objets.
Préparez-vous à faire de votre Rover Martien un as de l’évitement !
Objectifs d’apprentissage
Comprendre les principes de fonctionnement du module infrarouge anti-obstacle et son application dans le Rover Martien
Apprendre à lire et à utiliser les données du module infrarouge anti-obstacle dans Scratch
Créer un jeu d’évitement d’obstacles sur le thème de l’exploration martienne en utilisant le module IR et la scène Scratch
Découvrir le module anti-obstacle
Dites bonjour au nouveau compagnon de votre GalaxyRVR – le module infrarouge anti-obstacle ! Ce petit dispositif ingénieux aide votre rover à détecter et à éviter les obstacles. Voyons ce qui le fait fonctionner :
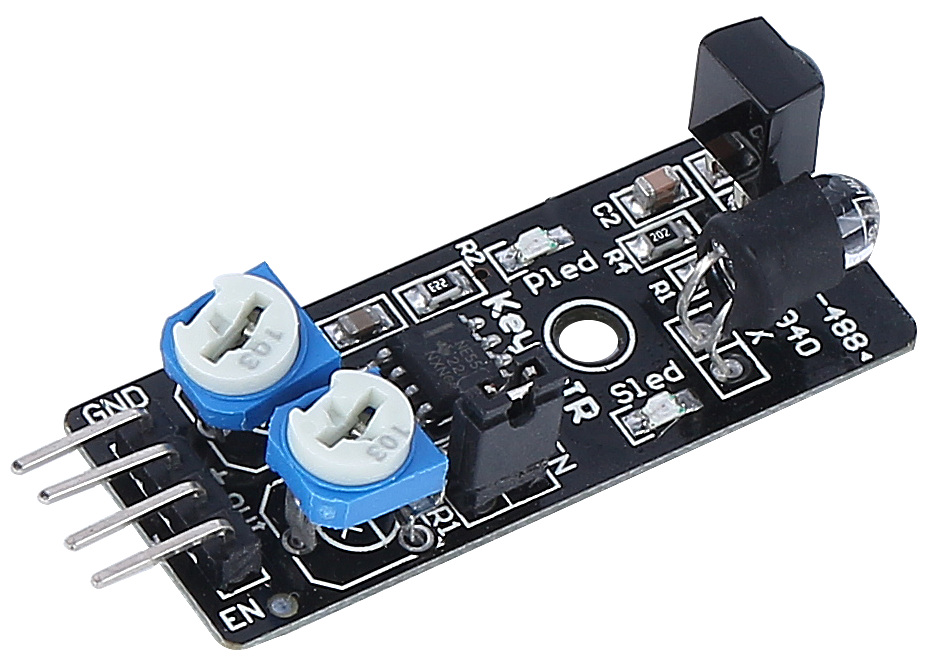
Les quatre broches importantes :
GND – La masse (ferme le circuit)
+ – Alimentation électrique (nécessite 3,3 V à 5 V)
Out – Sortie du signal (envoie les messages « obstacle détecté »)
EN – Broche d’activation (contrôle quand le module est actif)
Comment ça marche – La lampe torche invisible :
Imaginez ce module comme une lampe torche invisible avec des lunettes spéciales :
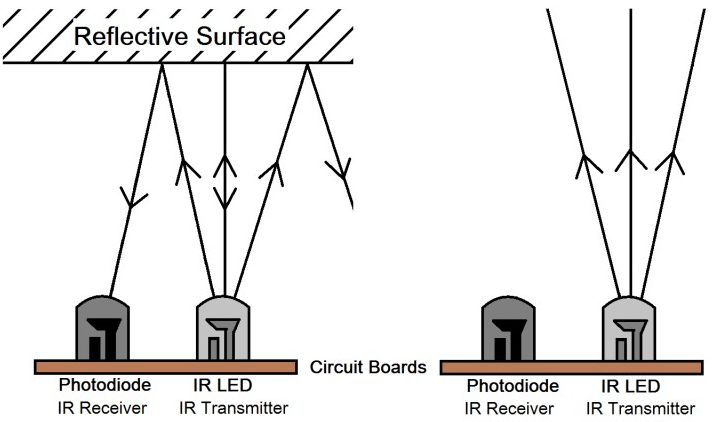
L’émetteur envoie de la lumière infrarouge (invisible à nos yeux)
Lorsque la lumière rencontre un obstacle, elle rebondit
Le récepteur « voit » la lumière réfléchie
Le module envoie un signal : « Obstacle devant ! »
Informations utiles sur votre capteur :
Portée de détection : 2 à 40 cm (environ la longueur de votre trousse !)
La couleur compte : Fonctionne mieux avec les objets de couleur claire
Objets sombres : Plus difficiles à détecter de loin
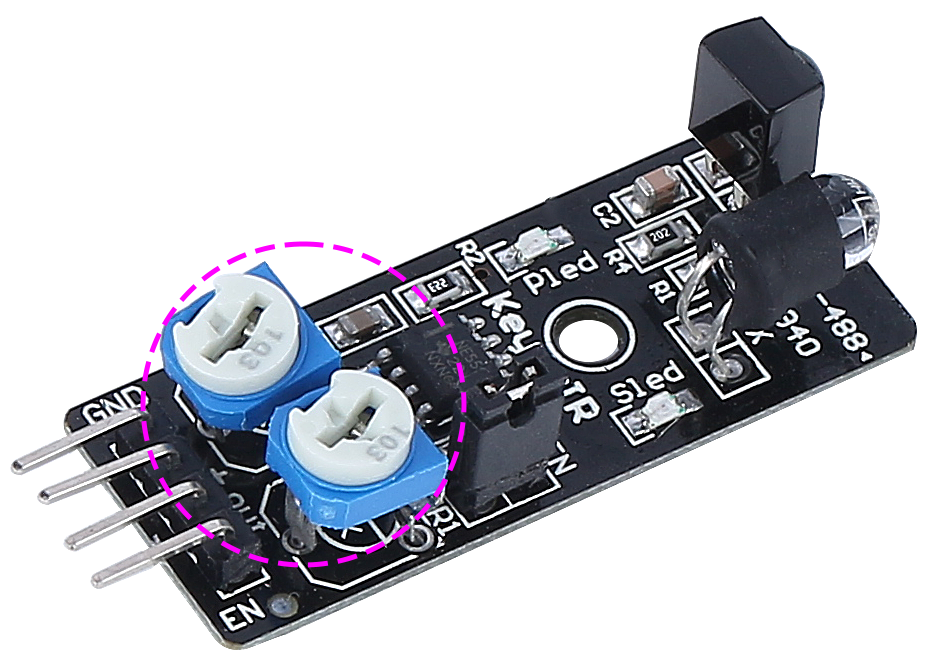
Contrôles avancés (pour les esprits curieux) :
Broche EN : Le cavalier maintient le module toujours actif. Retirez-le si vous souhaitez contrôler le module par code.

Deux réglages :
Un bouton contrôle la distance parcourue par la lumière infrarouge
Un bouton ajuste la fréquence de la lumière
Maintenant que vous avez fait connaissance avec votre nouveau compagnon, connectons-le à votre rover et commençons à programmer !
Tester vos capteurs infrarouges
Commencez par Connecter l’application au GalaxyRVR.
Réglons vos capteurs pour des performances optimales !
Assurez-vous que les composants infrarouges sont droits. Ajustez-les doucement si nécessaire.
Placez un objet (comme la boîte de votre rover) à 20 cm. Tournez le bouton jusqu’à ce que le voyant s’allume. Testez en rapprochant et en éloignant l’objet.
Faites de même pour l’autre module infrarouge.
Trouvez les blocs « état IR gauche » et « état IR droit » dans la catégorie GalaxyRVR et cochez leurs cases.
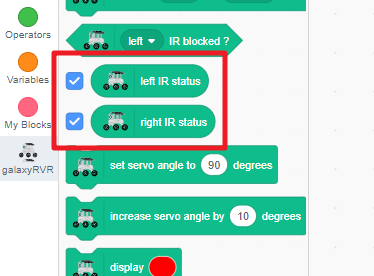
Les valeurs des capteurs s’afficheront maintenant sur votre scène.
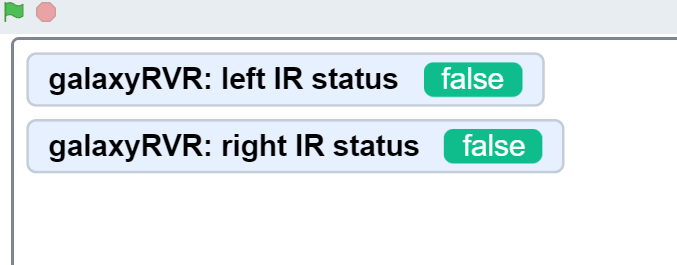
Passez votre main près de chaque capteur infrarouge et regardez les valeurs changer !
Signification des valeurs :
True (Vrai) = Obstacle détecté
False (Faux) = Voie libre
Vous êtes maintenant prêt à voir ce que votre rover peut « voir » !
Programmer votre rover pour éviter les obstacles
Apprenons à votre GalaxyRVR à esquiver automatiquement les obstacles grâce à ses capteurs infrarouges !
Commencez par Connecter l’application au GalaxyRVR.
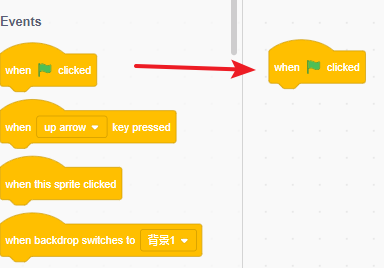
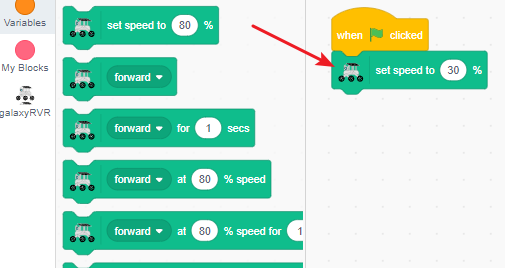
Démarrez le programme avec un bloc drapeau vert.
Réglez une vitesse de sécurité de 30 % pour faciliter les tests et le débogage.
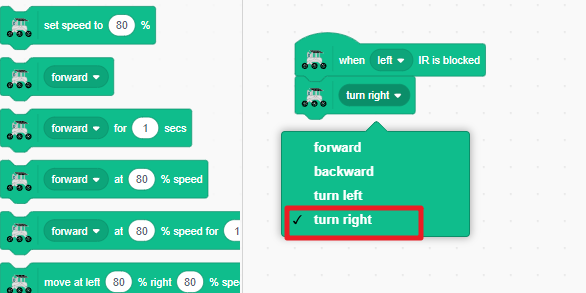
Trouvez le bloc
when left IR is blockedpour la détection du capteur gauche.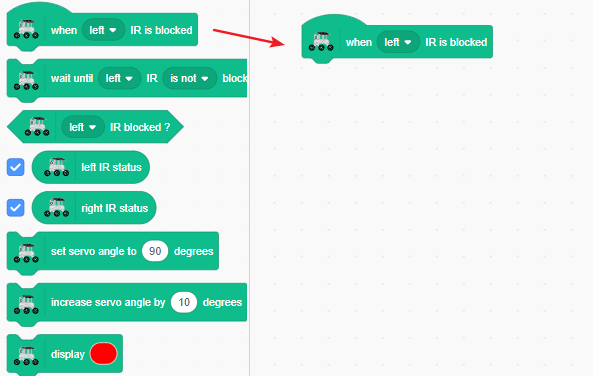
Lorsque le capteur gauche détecte un obstacle, faites tourner le rover à droite.
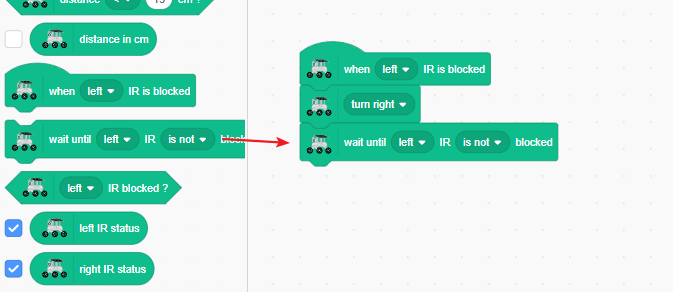
Continuez à tourner à droite jusqu’à ce que le côté gauche ne détecte plus l’obstacle.
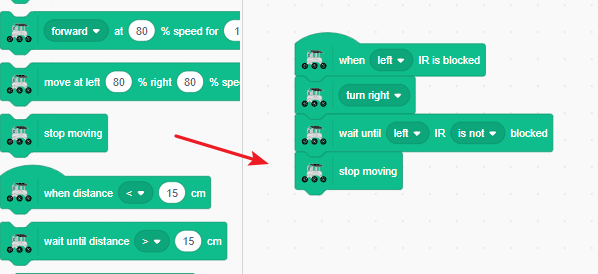
Arrêtez le mouvement une fois la voie dégagée.
Testez en déclenchant le capteur infrarouge gauche avec votre main. Le GalaxyRVR devrait tourner à droite pour l’éviter.
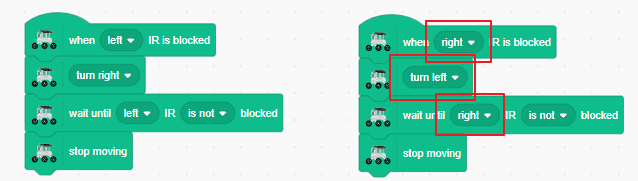
Dupliquez le code en appuyant longuement sur les blocs et en sélectionnant Dupliquer dans le menu.
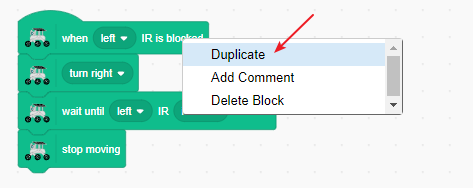
Dans le code dupliqué, inversez les côtés gauche et droit pour gérer les obstacles du côté droit.
Pour éviter un comportement erratique lorsque les deux capteurs sont déclenchés en même temps, ajoutez un bloc « stop other scripts in sprite ». Cela garantit qu’un seul événement de capteur est traité à la fois.
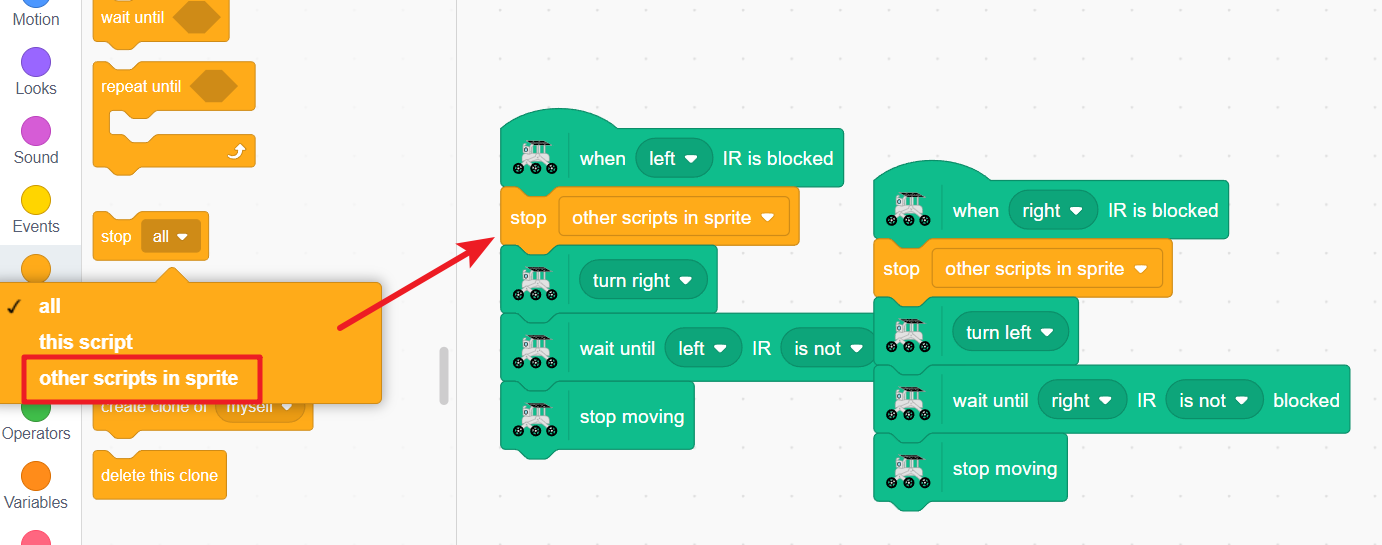
Note
Le bloc d’arrêt des scripts peut entrer en conflit avec les blocs de mouvement chronométrés, évitez donc de les utiliser ensemble lorsque c’est possible.
Votre GalaxyRVR tournera maintenant à gauche ou à droite lorsque des obstacles sont détectés de chaque côté. Testez en déclenchant les deux capteurs avec vos mains.
Ajoutez un bloc « avancer » sous chaque section de code pour que le rover continue d’avancer après avoir évité les obstacles.
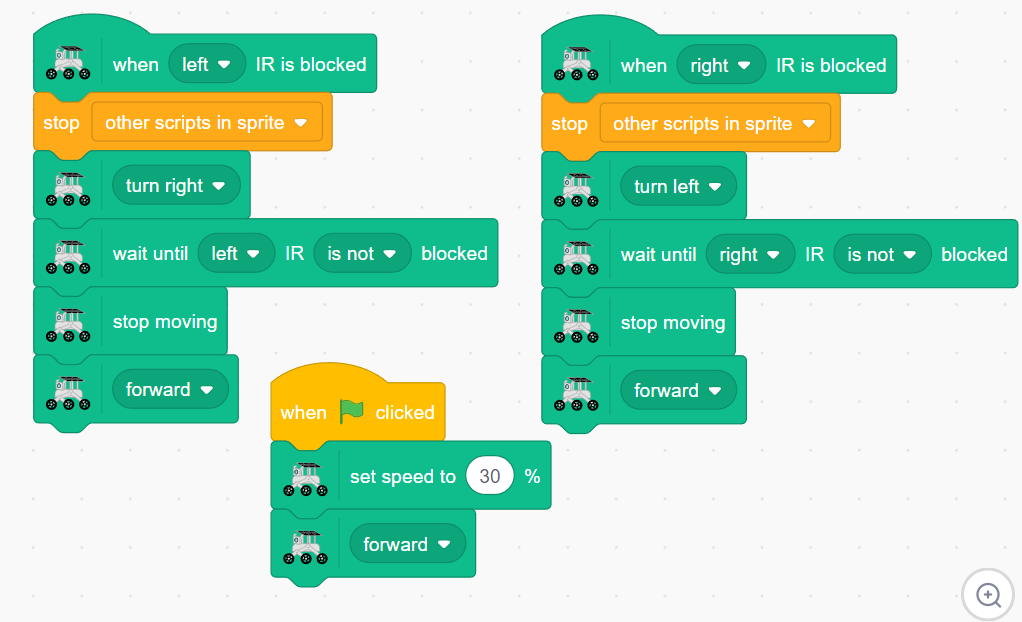
Cliquez maintenant sur le drapeau vert ! Votre GalaxyRVR avancera en continu, esquivant intelligemment les obstacles et reprenant sa trajectoire après les avoir contournés.
Blocs liés au module IR
Bloc d’événement déclenché lorsque le capteur IR gauche détecte un obstacle
Changez « left » en « right » dans le menu déroulant

Met le programme en pause jusqu’à ce que le capteur IR gauche ne détecte plus d’obstacle
Changez « left » en « right » pour l’autre capteur
Changez « is not » en « is » pour la condition inverse

Bloc conditionnel qui renvoie VRAI si le capteur IR gauche détecte un obstacle
Idéal avec les instructions
siChangez « left » en « right » pour l’autre capteur

Affiche l’état actuel de détection du capteur IR gauche

Affiche l’état actuel de détection du capteur IR droit
