Note
Bonjour, bienvenue dans la communauté des passionnés de SunFounder Raspberry Pi, Arduino et ESP32 sur Facebook ! Plongez au cœur de Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et les défis techniques grâce à l’aide de notre communauté et de notre équipe.
Apprendre & Partager : Échangez des conseils et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et à des aperçus privilégiés.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et concours : Participez à des concours et des promotions durant les fêtes.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
Leçon 4 : Le module ultrasonique
Donnez à votre GalaxyRVR le pouvoir de « voir » avec le son !
Découvrez comment les capteurs ultrasoniques fonctionnent comme l’écholocalisation des chauves-souris – en émettant des ondes sonores et en écoutant leurs échos pour détecter les obstacles et mesurer les distances.
Rendez votre Rover Martien plus intelligent et plus sûr dans ses explorations !
Objectifs d’apprentissage
Découvrir comment les capteurs ultrasoniques utilisent les ondes sonores pour mesurer la distance
Apprendre à lire les mesures de distance avec l’application Mammoth Coding
Programmer votre GalaxyRVR pour éviter les obstacles à l’aide du capteur ultrasonique
Découvrir le module ultrasonique
Voici le capteur ultrasonique HC-SR04 – le nouveau « super-pouvoir » de votre rover pour voir les distances sans rien toucher ! Tout comme les chauves-souris utilisent le son pour se repérer, cet appareil ingénieux peut détecter des objets situés entre 2 cm et 400 cm de distance.

Les quatre broches importantes :
TRIG – Le « bouton de démarrage » qui ordonne au capteur d’émettre des ondes sonores
ECHO – Écoute l’écho renvoyé par les objets
VCC – Alimentation électrique (nécessite 5 V)
GND – Masse (ferme le circuit)
Comment ça marche – Le jeu de l’écho :
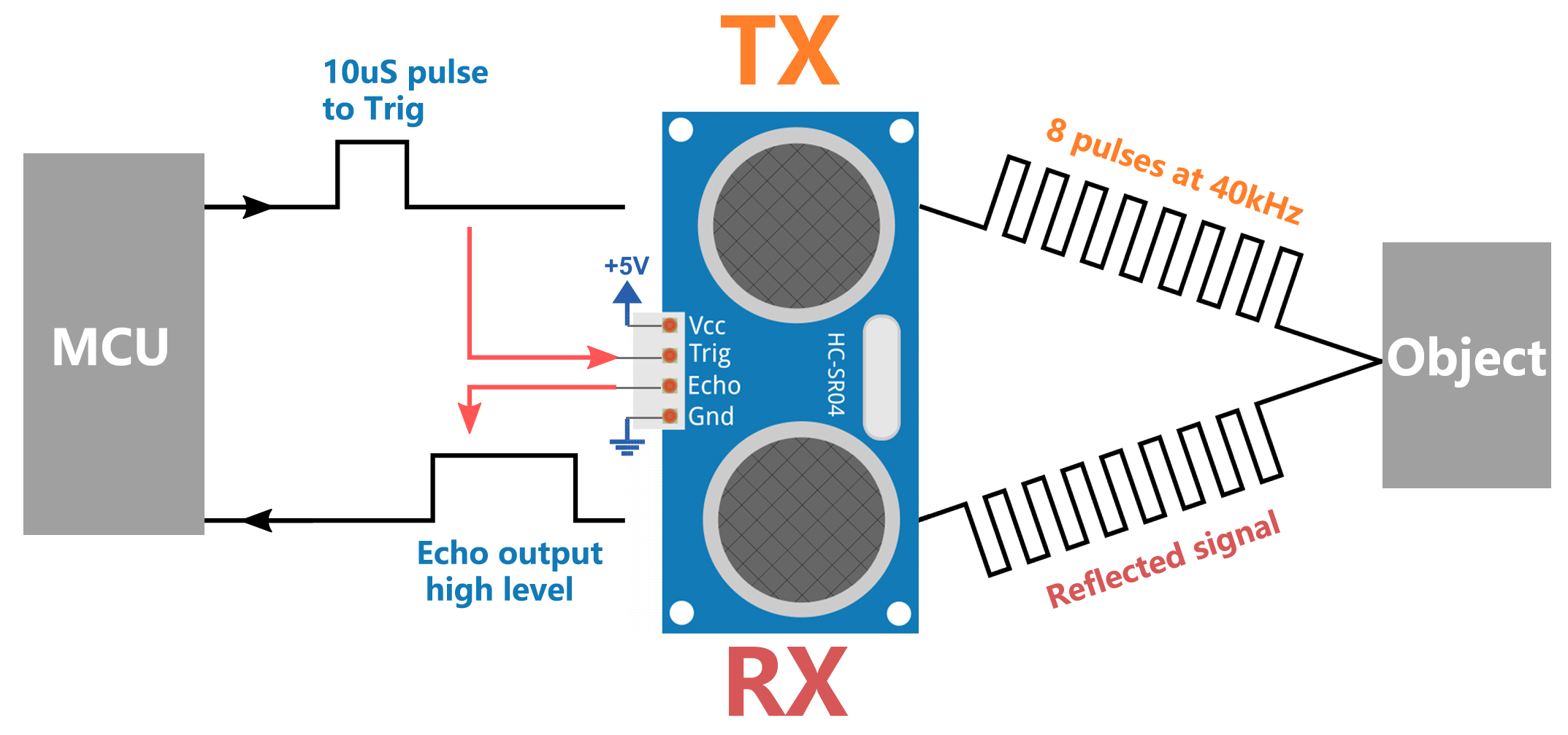
ÉMISSION – Le capteur envoie 8 ondes sonores rapides (trop aiguës pour nos oreilles !)
ÉCOUTE – Il déclenche un chronomètre et attend le retour de l’écho
CALCUL – À partir du temps d’écho, il calcule : Distance = (Temps × Vitesse du son) ÷ 2
C’est comme crier dans un canyon et compter le temps que met l’écho à revenir. Plus l’attente est longue, plus la paroi est éloignée !
Maintenant, offrons ce super-pouvoir à votre Rover Martien !
Tester le capteur ultrasonique
Commencez par Connecter l’application au GalaxyRVR.
Trouvez le bloc « distance en cm » dans la catégorie GalaxyRVR et cochez sa case.

La valeur mesurée par le capteur s’affichera alors en direct sur la scène.
Passez votre main devant le capteur ultrasonique et regardez le nombre changer – il mesure la distance en centimètres !
Créer un rover anti-obstacle
Programmons votre GalaxyRVR pour qu’il évite automatiquement les obstacles grâce au capteur ultrasonique.
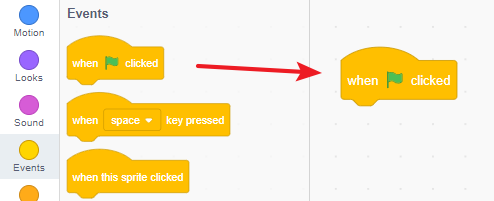
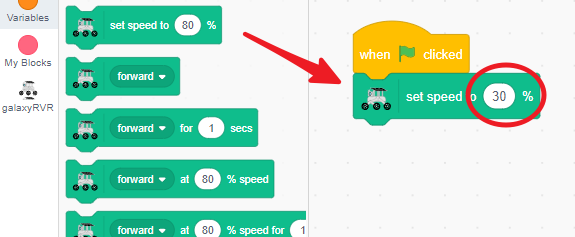
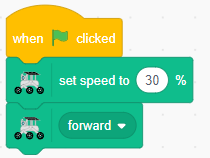
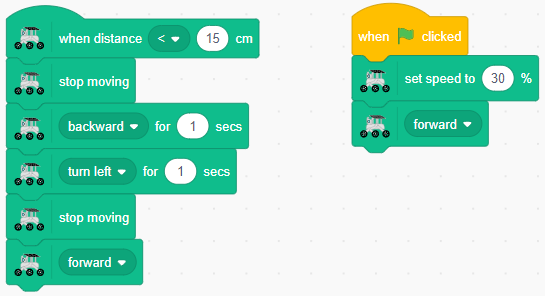
Commencez par le bloc drapeau vert.
Définissez une vitesse confortable (nous recommandons 30 %) pour les tests.
Ajoutez un bloc « avancer » pour que le rover continue d’avancer lorsque la voie est libre.
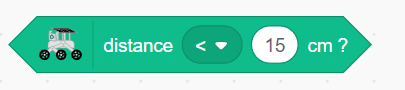
Utilisez le bloc
when distance < 15 cmpour détecter les obstacles proches.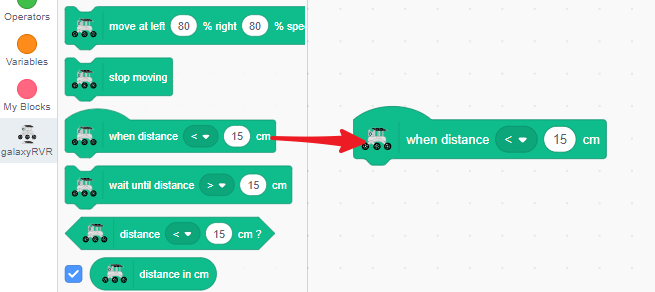
Lorsqu’un objet s’approche trop près, faites arrêter le rover et reculer.
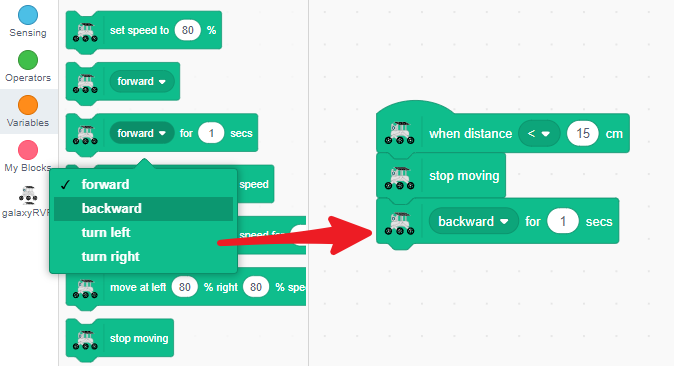
Faites-le ensuite tourner légèrement (à gauche ou à droite – à vous de choisir !).
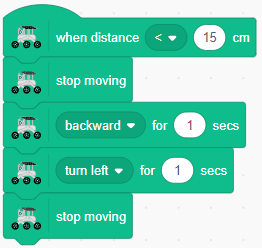
Enfin, ordonnez-lui d’avancer à nouveau sur sa nouvelle trajectoire.
Placez maintenant votre GalaxyRVR au sol et regardez-le partir ! Il avancera jusqu’à détecter un obstacle, puis changera intelligemment de direction pour continuer son exploration.
Blocs du capteur ultrasonique
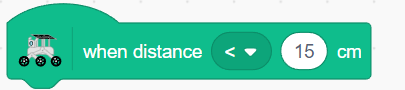
Bloc déclencheur d’événement
Lance du code lorsqu’un objet est détecté à une distance définie.
Modifiez le symbole de comparaison (< ou >)
Ajustez le seuil de distance (en cm)
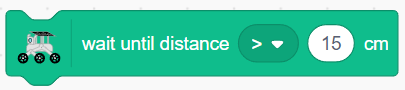
Bloc d’attente
Met votre programme en pause jusqu’à ce que le capteur détecte un objet à la distance spécifiée.
Choisissez < ou > pour la comparaison de distance
Définissez la valeur de distance souhaitée
Bloc de condition
Renvoie VRAI ou FAUX selon la détection de distance. Idéal avec les instructions
si.Basculez entre < et > selon le besoin
Définissez la limite de distance
Bloc de valeur de distance
Affiche la distance actuelle mesurée par le capteur ultrasonique en centimètres.