Nota
Ciao, benvenuto nella comunità di appassionati di SunFounder Raspberry Pi, Arduino e ESP32 su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti a noi?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra comunità e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Accedi in anteprima agli annunci di nuovi prodotti e agli sneak peek.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a giveaway e promozioni festive.
👉 Pronto per esplorare e creare con noi? Clicca [Qui] e unisciti oggi stesso!
MPU6050
Panoramica
In questo tutorial, imparerai a interfacciare il modulo IMU GY-87 con un Arduino Uno, concentrandoti sul sensore MPU6050. Tratteremo l’inizializzazione del MPU6050 e la visualizzazione dei dati dell’accelerometro, giroscopio e temperatura sul Monitor Seriale. Questa lezione è essenziale per progetti che richiedono il rilevamento del movimento e della temperatura, come robotica, dispositivi controllati da gesti e installazioni artistiche interattive.
Componenti necessari
In questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Elite Explorer Kit |
300+ |
Puoi anche acquistarli separatamente dai link qui sotto.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
- |
|
- |
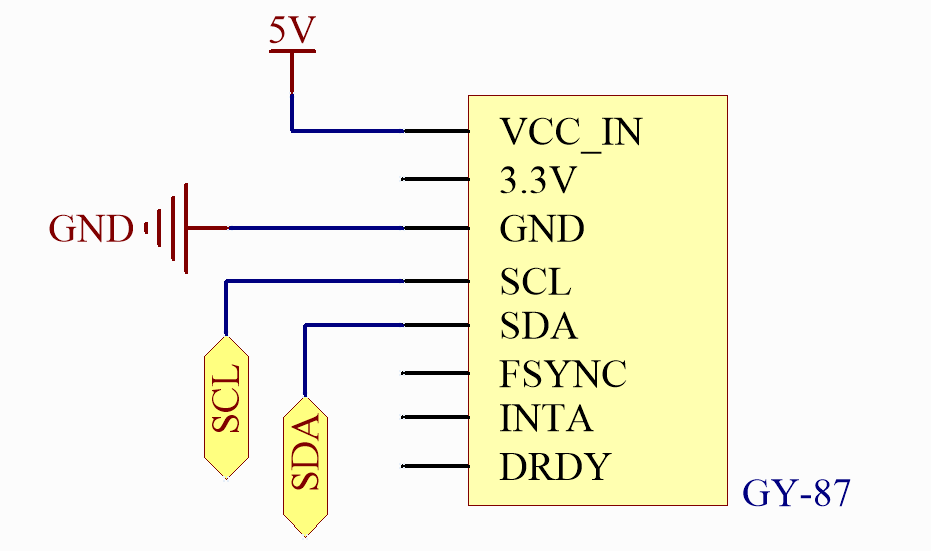
Collegamenti

Schema Elettrico
Codice
Nota
Puoi aprire il file
09-gy87_mpu6050.inodal percorsoelite-explorer-kit-main\basic_project\09-gy87_mpu6050direttamente.Oppure copia questo codice nell’IDE di Arduino.
Nota
Per installare la libreria, usa il Library Manager di Arduino e cerca «Adafruit MPU6050» e installala.
1/*
2 This Arduino code is designed for interfacing with the GY-87 IMU module, focusing
3 specifically on the MPU6050 sensor, which includes an accelerometer and a gyroscope.
4 The code initializes the MPU6050 sensor and prints its accelerometer, gyroscope, and
5 temperature readings to the Serial Monitor at regular intervals.
6
7 Board: Arduino Uno R4
8 Component: GY-87 IMU Module
9 Library: https://github.com/adafruit/Adafruit_MPU6050 (Adafruit MPU6050 by Adafruit)
10*/
11
12// Include required libraries
13#include <Adafruit_MPU6050.h>
14#include <Adafruit_Sensor.h>
15#include <Wire.h>
16
17// Initialize sensor objects
18Adafruit_MPU6050 mpu;
19
20void setup() {
21 // Initialize the serial communication with a baud rate of 9600
22 Serial.begin(9600);
23
24 // Initialize the MPU6050 sensor (accelerometer and gyroscope)
25 initializeMPU6050();
26}
27
28void loop() {
29 // Print MPU6050 data
30 printMPU6050();
31
32 delay(500);
33}
34
35
36void initializeMPU6050() {
37 // Check if the MPU6050 sensor is detected
38 if (!mpu.begin()) {
39 Serial.println("Failed to find MPU6050 chip");
40 while (1)
41 ; // Halt if sensor not found
42 }
43 Serial.println("MPU6050 Found!");
44
45 // set accelerometer range to +-8G
46 mpu.setAccelerometerRange(MPU6050_RANGE_8_G);
47
48 // set gyro range to +- 500 deg/s
49 mpu.setGyroRange(MPU6050_RANGE_500_DEG);
50
51 // set filter bandwidth to 21 Hz
52 mpu.setFilterBandwidth(MPU6050_BAND_21_HZ);
53
54 Serial.println("");
55 delay(100);
56}
57
58void printMPU6050() {
59
60 Serial.println();
61 Serial.println("MPU6050 ------------");
62
63 /* Get new sensor events with the readings */
64 sensors_event_t a, g, temp;
65 mpu.getEvent(&a, &g, &temp);
66
67 /* Print out the values */
68 Serial.print("Acceleration X: ");
69 Serial.print(a.acceleration.x);
70 Serial.print(", Y: ");
71 Serial.print(a.acceleration.y);
72 Serial.print(", Z: ");
73 Serial.print(a.acceleration.z);
74 Serial.println(" m/s^2");
75
76 Serial.print("Rotation X: ");
77 Serial.print(g.gyro.x);
78 Serial.print(", Y: ");
79 Serial.print(g.gyro.y);
80 Serial.print(", Z: ");
81 Serial.print(g.gyro.z);
82 Serial.println(" rad/s");
83
84 Serial.print("Temperature: ");
85 Serial.print(temp.temperature);
86 Serial.println(" degC");
87
88 Serial.println("MPU6050 ------------");
89 Serial.println();
90}
Analisi del Codice
Includi Librerie
Le librerie
Adafruit_MPU6050,Adafruit_SensoreWiresono incluse per l’interfacciamento e la comunicazione del sensore.#include <Adafruit_MPU6050.h> #include <Adafruit_Sensor.h> #include <Wire.h>
Inizializza Oggetto Sensore
Viene creato un oggetto della classe Adafruit_MPU6050 per rappresentare il sensore MPU6050.
Adafruit_MPU6050 mpu;
Funzione di Setup
Inizializza la comunicazione seriale e chiama la funzione per inizializzare il sensore MPU6050.
void setup() { Serial.begin(9600); initializeMPU6050(); }
Funzione di Loop
Chiama ripetutamente la funzione per stampare i dati del MPU6050 con un ritardo di 500 millisecondi tra ogni chiamata.
void loop() { printMPU6050(); delay(500); }
Funzione di Inizializzazione del MPU6050
Controlla se il MPU6050 è collegato, imposta i range di accelerometro e giroscopio, e configura la larghezza di banda del filtro.
void initializeMPU6050() { // Controlla se il sensore MPU6050 è rilevato if (!mpu.begin()) { Serial.println("Failed to find MPU6050 chip"); while (1) ; // Blocca se il sensore non è trovato } Serial.println("MPU6050 Found!"); // imposta il range dell'accelerometro a +-8G mpu.setAccelerometerRange(MPU6050_RANGE_8_G); // imposta il range del giroscopio a +- 500 deg/s mpu.setGyroRange(MPU6050_RANGE_500_DEG); // imposta la larghezza di banda del filtro a 21 Hz mpu.setFilterBandwidth(MPU6050_BAND_21_HZ); Serial.println(""); delay(100); }
Funzione per Stampare i Dati del MPU6050
Legge e stampa i dati di accelerazione, giroscopio e temperatura dal MPU6050 sul Monitor Seriale.
void printMPU6050() { Serial.println(); Serial.println("MPU6050 ------------"); /* Ottieni nuovi eventi del sensore con le letture */ sensors_event_t a, g, temp; mpu.getEvent(&a, &g, &temp); /* Stampa i valori */ Serial.print("Accelerazione X: "); Serial.print(a.acceleration.x); Serial.print(", Y: "); Serial.print(a.acceleration.y); Serial.print(", Z: "); Serial.print(a.acceleration.z); Serial.println(" m/s^2"); Serial.print("Rotation X: "); Serial.print(g.gyro.x); Serial.print(", Y: "); Serial.print(g.gyro.y); Serial.print(", Z: "); Serial.print(g.gyro.z); Serial.println(" rad/s"); Serial.print("Temperature: "); Serial.print(temp.temperature); Serial.println(" degC"); Serial.println("MPU6050 ------------"); Serial.println(); }