Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.13 Motor
Überblick
In dieser Lektion lernen Sie, wie man einen Motor verwendet, dessen Funktionsprinzip darin besteht, dass die erregte Spule gezwungen wird, sich im Magnetfeld zu drehen, dann dreht sich der Rotor des Motors entsprechend, woraufhin das Ritzel das Schwungrad des Motors antreibt, um sich zu drehen.
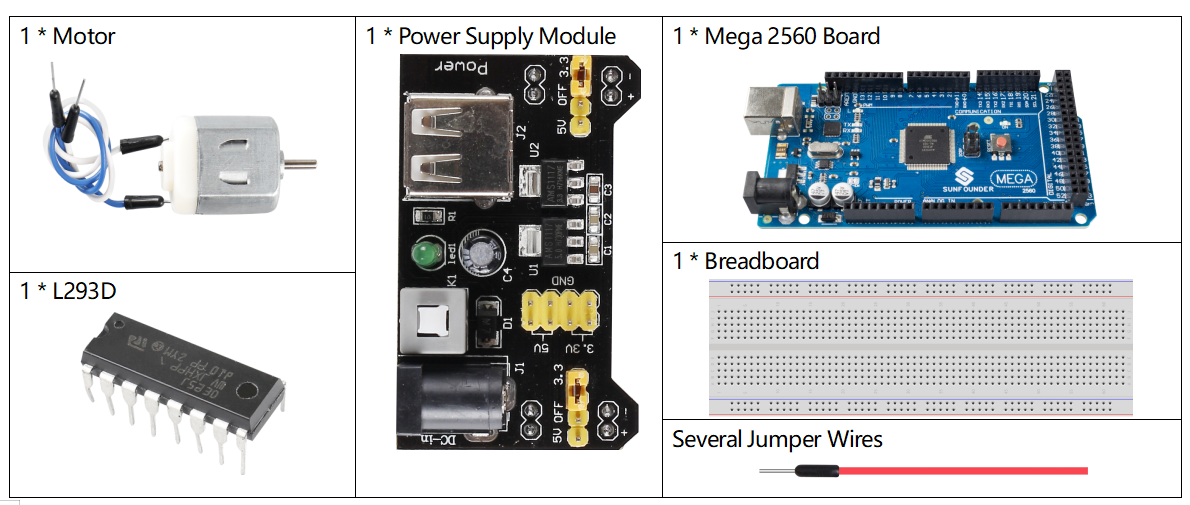
Erforderliche Komponenten
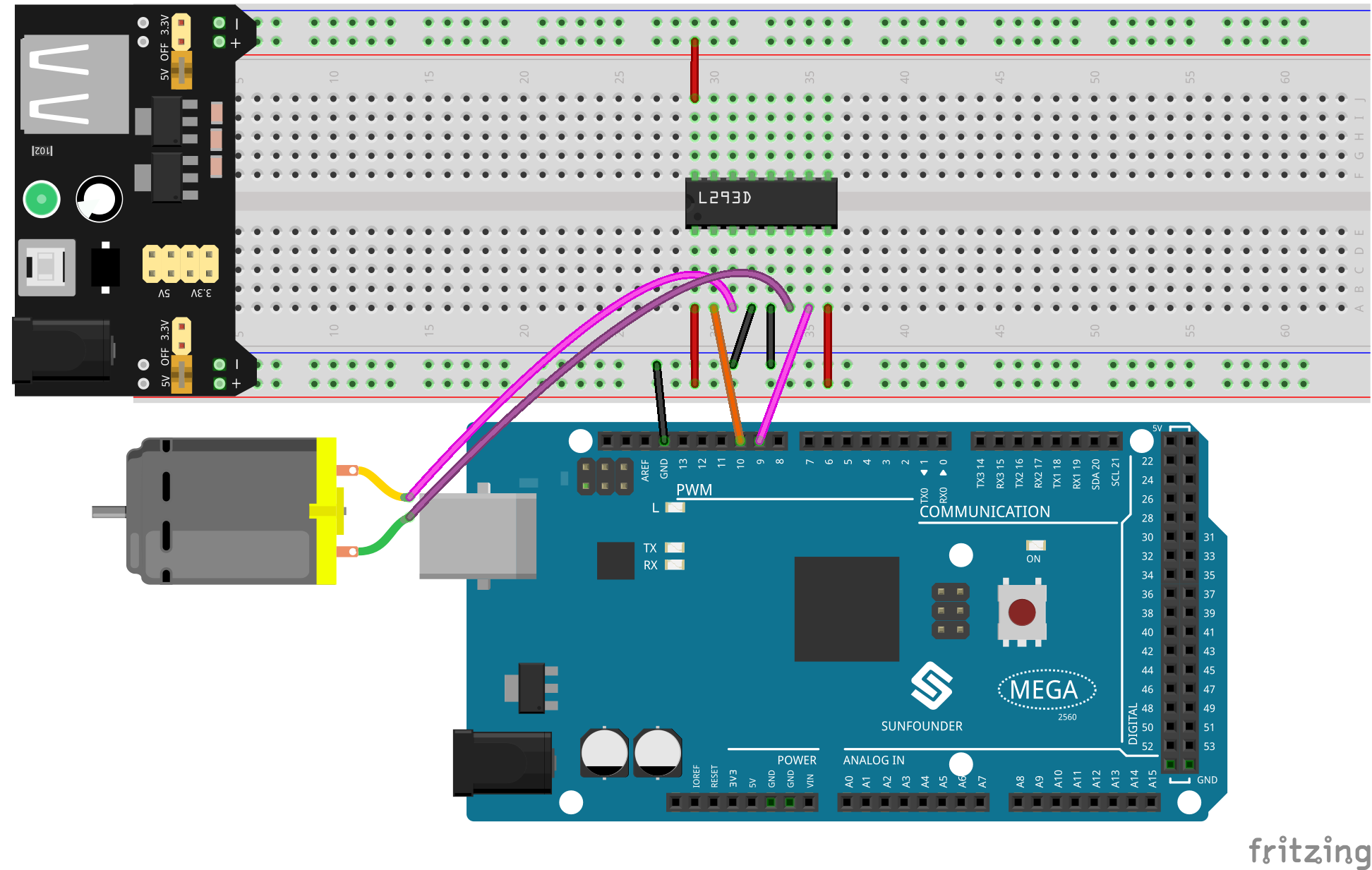
Fritzing-Schaltung
In diesem Beispiel verwenden wir das Stromversorgungsmodul, um die Anode und Kathode des Steckbretts mit Strom zu versorgen. GND des Mega 2560 Boards ist mit der Kathode verbunden.
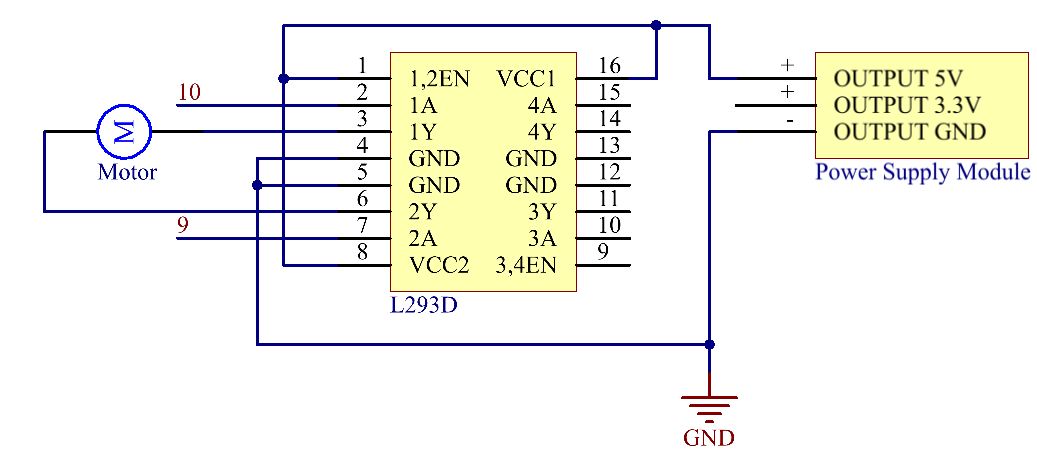
Schematische Darstellung
Code
Bemerkung
Sie können die Datei
2.13_motor.inounter dem Pfadsunfounder_vincent_kit_for_arduino\code\2.13_motordirekt öffnen.Oder kopieren Sie diesen Code in Arduino IDE.
Nachdem Sie die Codes auf das Mega2560-Board hochgeladen haben, können Sie die Drehrichtung des Motors auswählen, indem Sie im seriellen Monitor 「A」 oder 「B」 eingeben.
Code-Analyse
Der Motor kann angetrieben werden, indem eine Spannungsdifferenz zwischen den Kupferblechen auf beiden Seiten des Motors bereitgestellt wird. Daher brauchen Sie nur 0 für die Spannung der einen Seite des Kupferblechs und 5 V für die andere Seite zu schreiben. Ändern Sie den geschriebenen analogen Signalwert, um Richtung und Geschwindigkeit anzupassen.
void clockwise(int Speed)
{
analogWrite(motor1A,0);
analogWrite(motor2A,Speed);
}
void anticlockwise(int Speed)
{
analogWrite(motor1A,Speed);
analogWrite(motor2A,0);
}
In diesem Beispiel wird Serial.Read() verwendet, um die Richtung des Motors zu steuern.
Wenn Sie A in den seriellen Monitor eingeben, wird die Funktion im Uhrzeigersinn (255) aufgerufen, um den Motor mit der Geschwindigkeit von 255 drehen zu lassen. Geben Sie B ein, und der Motor dreht sich in umgekehrter Richtung.
void loop() {
if (Serial.available() > 0) {
int incomingByte = Serial.read();
switch(incomingByte){
case 'A':
clockwise(255);
Serial.println("The motor rotate clockwise.");
break;
case 'B':
anticlockwise(255);
Serial.println("The motor rotate anticlockwise.");
break;
}
}
delay(3000);
stopMotor();
}
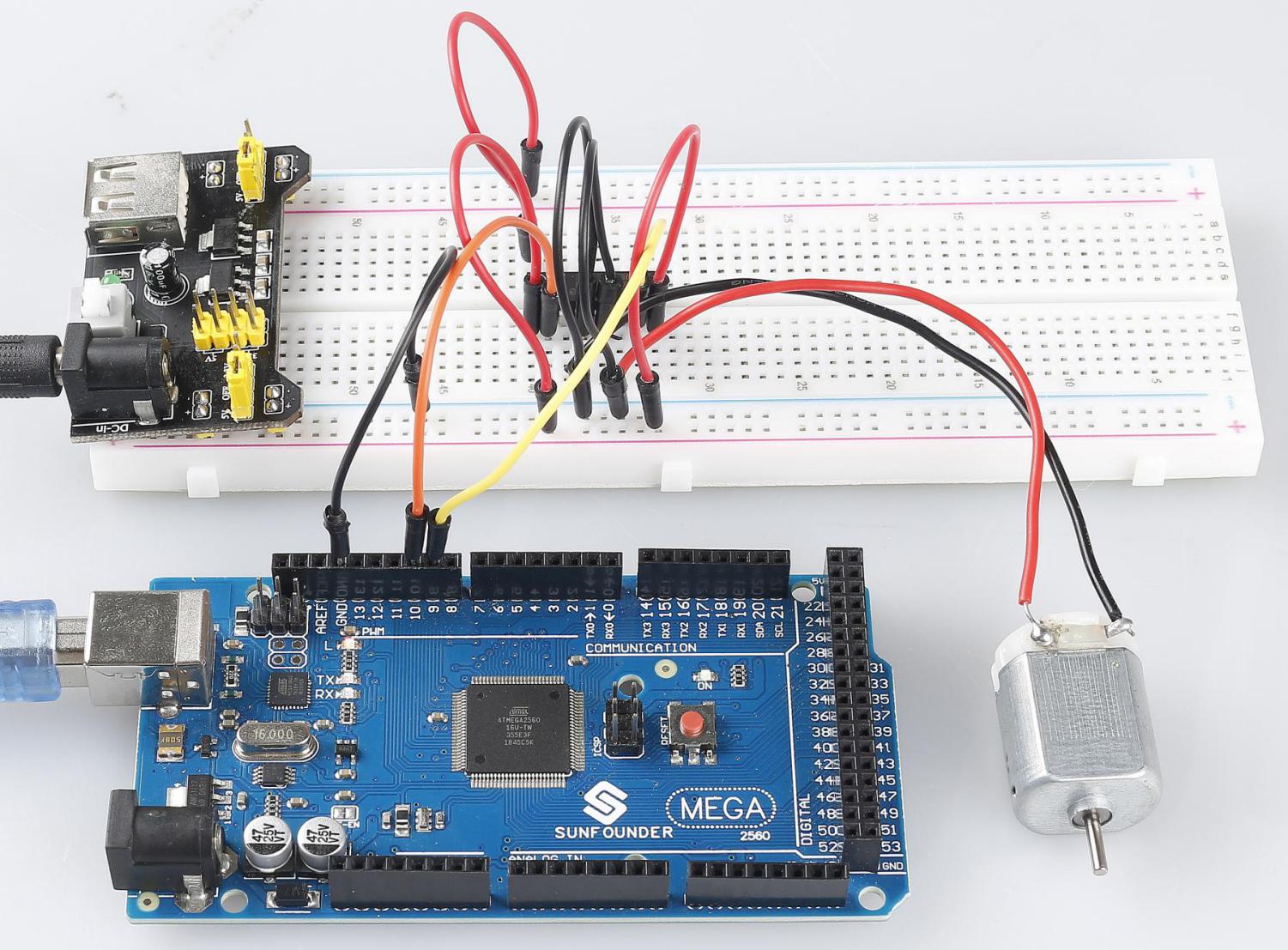
Phänomen Bild