Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.14 Schrittmotor
Überblick
In dieser Lektion lernen Sie Schrittmotoren kennen.
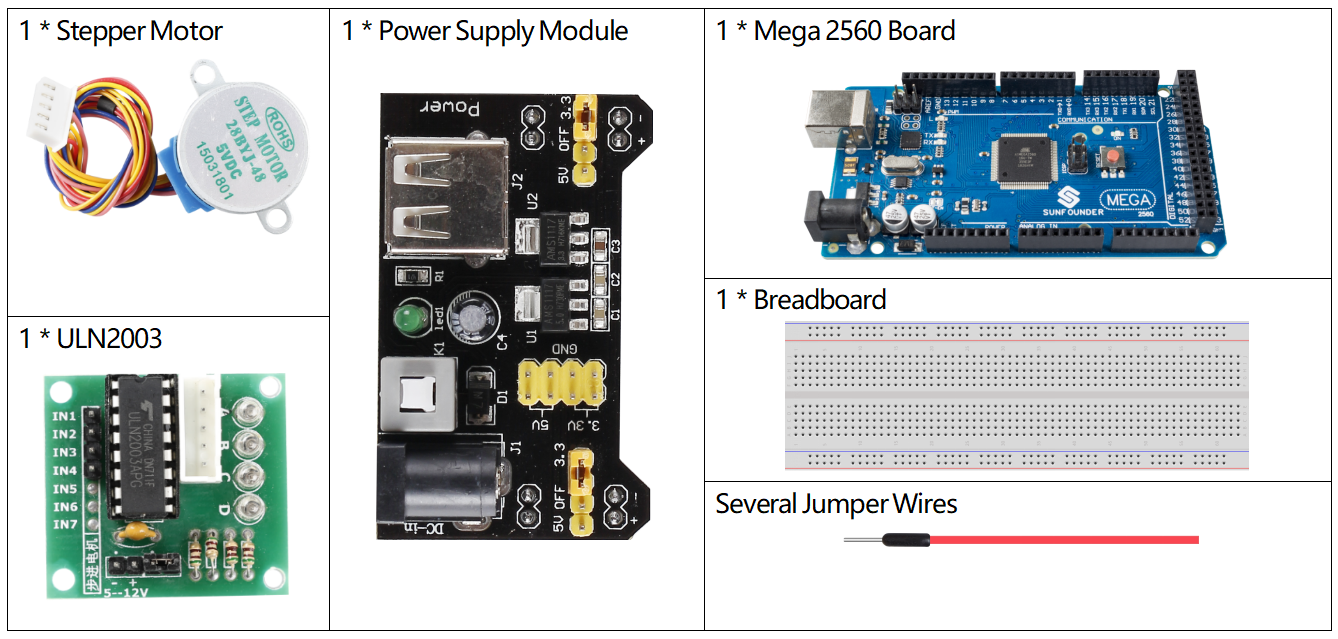
Erforderliche Komponenten
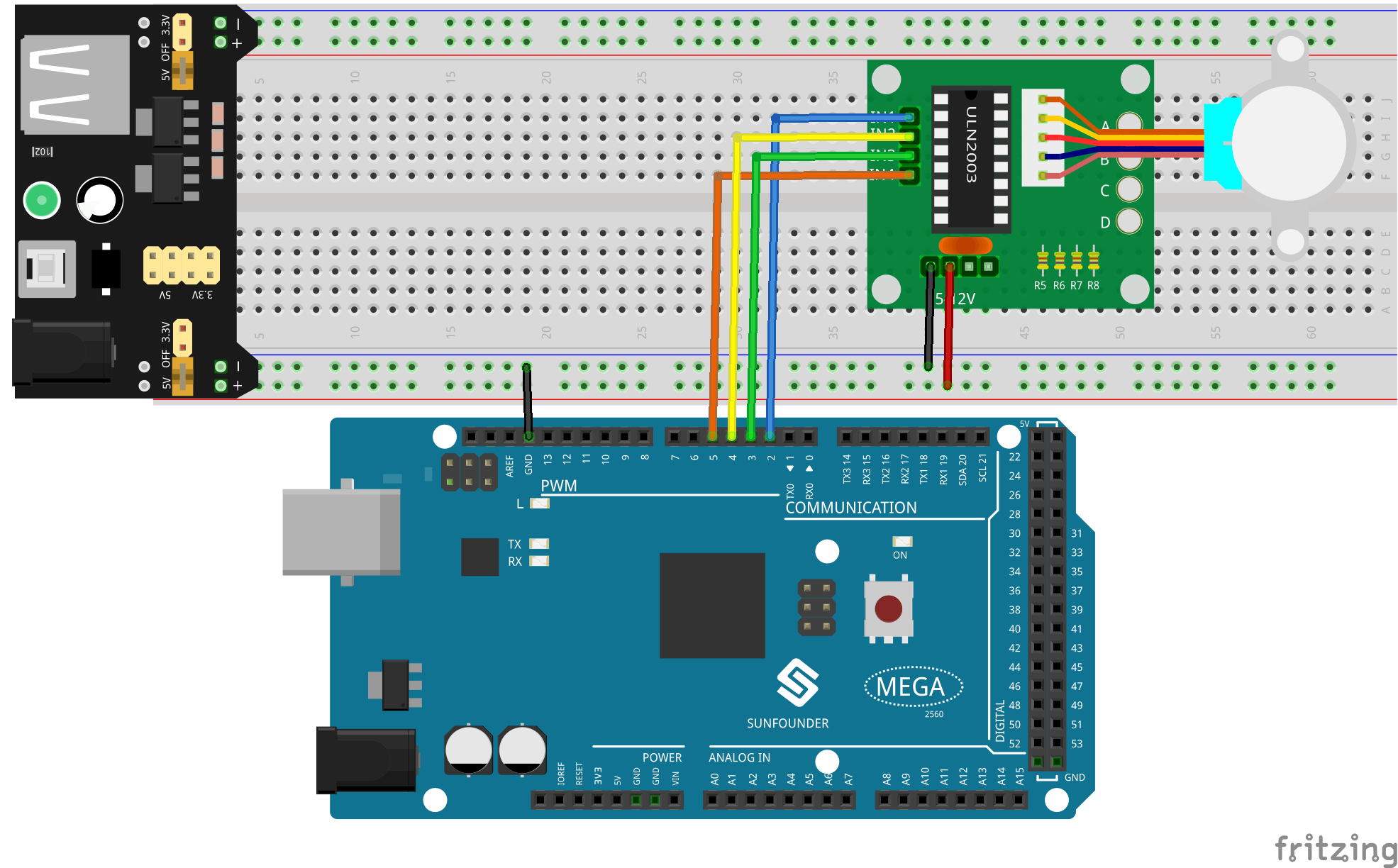
Fritzing-Schaltung
Das Stromversorgungsmodul wird verwendet, um den Schrittmotor mit Strom zu versorgen. Verbinden Sie den GND des Mega 2560-Boards und den GND des ULN2003 mit der Kathode des Steckbretts und verbinden Sie den VCC des ULN2003 mit dem 5-V-AUSGANG des Netzteils.
Die Verkabelung von ULN2003 und Mega2560 ist wie folgt dargestellt:
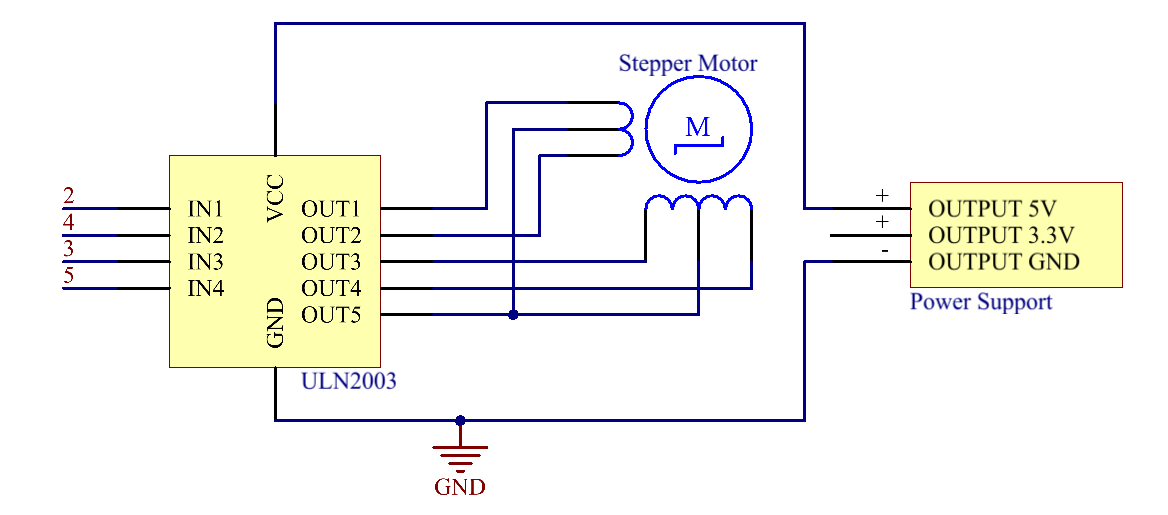
Schematische Darstellung
Code
Bemerkung
Sie können die Datei
2.14_stepperMotor.inounter dem Pfadsunfounder_vincent_kit_for_arduino\code\2.14_stepperMotordirekt öffnen.Oder kopieren Sie diesen Code in Arduino IDE.
Nachdem Sie die Codes auf das Mega2560-Board hochgeladen haben, können Sie sehen, dass der Schrittmotor einen Kreis mit einem Intervall von einer Sekunde dreht und jeder Kreis 3,75 Sekunden dauert.
Code-Analyse
Durch den Aufruf der Bibliothek Stepper.h können Sie den Schrittmotor einfach ansteuern.
#include <Stepper.h>
Bibliotheksfunktionen:
Stepper(steps, pin1, pin2, pin3, pin4)
Erstellt eine neue Instanz der Stepper-Klasse, die einen bestimmten Schrittmotor darstellt, der an Ihr Arduino-Board angeschlossen ist.
steps: die Anzahl der Schritte in einer Umdrehung Ihres Motors. Wenn Ihr Motor die Gradzahl pro Schritt angibt, teilen Sie diese Zahl durch 360, um die Anzahl der Schritte zu erhalten (z. B. 360 / 3,6 ergibt 100 Schritte). (int)
Bemerkung
Jeder Kreis des Schrittmotors dauert 2048 Schritte.
setSpeed(rpm)
Legt die Motordrehzahl in Umdrehungen pro Minute fest. Diese Funktion lässt den Motor nicht drehen, sondern legt nur die Geschwindigkeit fest, mit der er sich dreht, wenn Sie step() aufrufen.
rpm: die Drehzahl, mit der sich der Motor in Umdrehungen pro Minute drehen soll - eine positive Zahl. (lang)
Bemerkung
Der hier verwendete Schrittmotor dreht maximal 17 Kreise pro Minute.
step(steps)
Dreht den Motor um eine bestimmte Anzahl von Schritten mit einer Geschwindigkeit, die durch den letzten Aufruf von setSpeed() bestimmt wird.
Diese Funktion blockiert; Das heißt, es wird warten, bis der Motor die Bewegung beendet hat, um die Steuerung an die nächste Zeile in Ihrer Skizze zu übergeben. Wenn Sie beispielsweise die Geschwindigkeit auf beispielsweise 1 U/min einstellen und bei einem Motor mit 2048 Schritten step(2048) aufrufen, würde diese Funktion eine volle Minute dauern, um ausgeführt zu werden. Halten Sie zur besseren Kontrolle die Geschwindigkeit hoch und gehen Sie bei jedem Aufruf von step() nur wenige Schritte.
steps: Die Anzahl der Schritte, um den Motor zu drehen - positiv, um in eine Richtung zu drehen, negativ, um in die andere Richtung zu drehen. (int)
Phänomen Bild