Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.34 MPU6050-Modul
Überblick
In dieser Lektion lernen Sie, wie Sie MPU6050 verwenden. MPU-6050 ist ein 6-Achsen-Bewegungsverfolgungsgerät (kombiniert aus 3-Achsen-Gyroskop und 3-Achsen-Beschleunigungsmesser). Es wird häufig für Augmented Reality und elektronische Bildstabilisierung (EIS: Electronic Image Stabilization), optische Bildstabilisierung (OIS: Optical Image Stabilization) und „Zero Touch“-Gesten-Benutzeroberfläche verwendet.
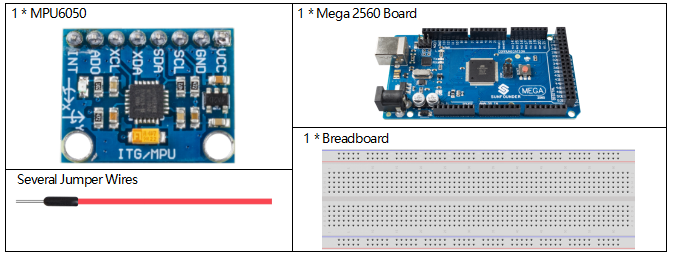
Erforderliche Komponenten
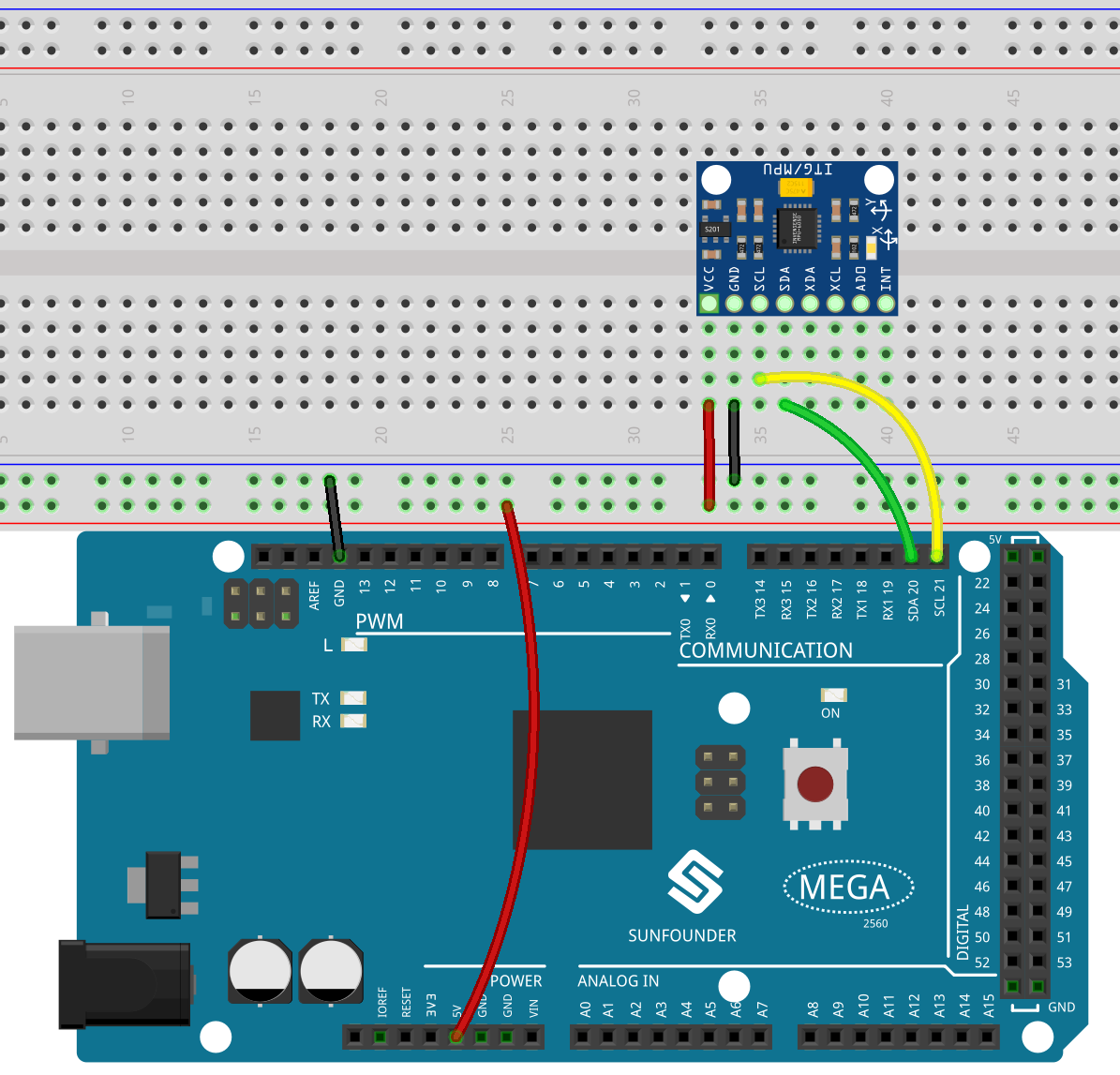
Fritzing-Schaltung
In dieser Lektion lernen Sie, wie Sie MPU6050 verwenden. MPU-6050 ist ein 6-Achsen-Bewegungsverfolgungsgerät (kombiniert aus 3-Achsen-Gyroskop und 3-Achsen-Beschleunigungsmesser). Es wird häufig für Augmented Reality und elektronische Bildstabilisierung (EIS: Electronic Image Stabilization), optische Bildstabilisierung (OIS: Optical Image Stabilization) und „Zero Touch“-Gesten-Benutzeroberfläche verwendet.
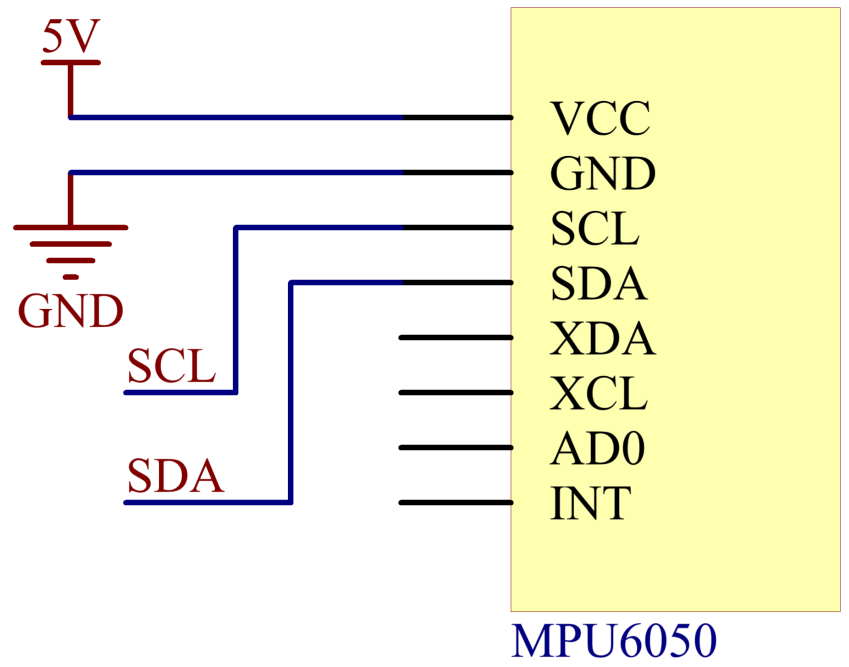
Schematische Darstellung
Code
Bemerkung
Sie können die Datei
2.34_MPU6050.inounter dem Pfadsunfounder_vincent_kit_for_arduino\code\2.34_MPU6050direkt öffnen.Oder kopieren Sie diesen Code in Arduino IDE.
Nachdem Sie die Codes auf das Mega2560-Board hochgeladen haben, können Sie den seriellen Monitor öffnen, um die Schwerkraftbeschleunigung und Winkelgeschwindigkeit von MPU6050 in jeder Richtung zu sehen.
Code-Analyse
Im stationären Desktop-Zustand beträgt die Beschleunigung der Z-Achse 1 Gravitationseinheit und die X- und Y-Achse sind 0.
Vor der Verwendung müssen Sie das Modul kalibrieren, die Methoden sind wie folgt:
MPU6050-Module werden horizontal auf dem Schreibtisch platziert und können dann mit Klemmen oder Klebeband befestigt werden.
Führen Sie die Beispielcodes aus, um die ROHDATEN von MPU6050 zu erhalten, wenn es statisch ist.
Fügen Sie eine Kompensation gemäß den Messwerten hinzu, wenn MPU6050 statisch ist.
Nehmen Sie die MPU6050, die wir als Beispiel verwenden, und die Ergebnisse der Kompensation sind wie folgt:
Serial.print(AcX / 65536 * ACCELE_RANGE - 0.02);
Serial.print(AcY / 65536 * ACCELE_RANGE + 0);
Serial.print(AcZ/65536 * ACCELE_RANGE + 0.02);
Serial.print(GyX / 65536 * GYROSC_RANGE + 1.70);
Serial.print(GyY/65536 * GYROSC_RANGE - 1.70);
Serial.print(GyZ/65536*GYROSC_RANGE + 0.25);
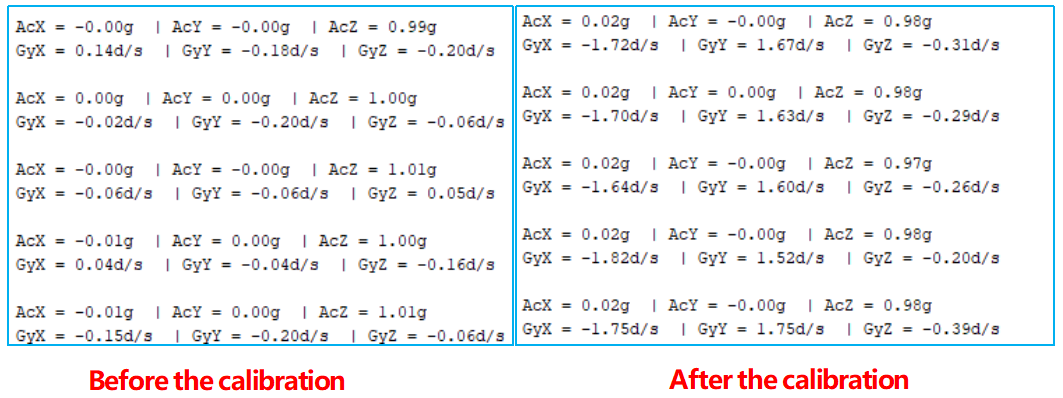
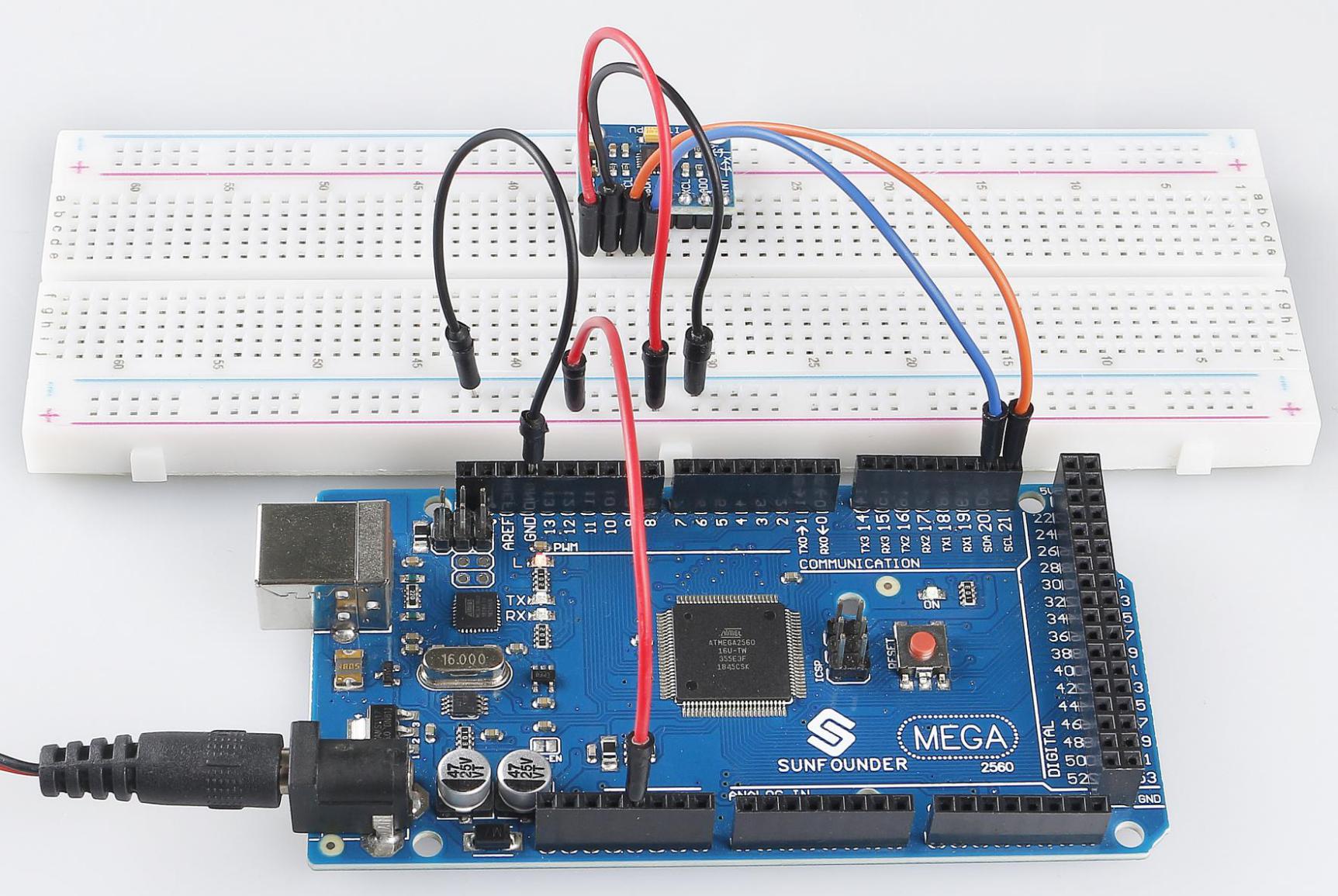
Phänomen Bild