Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.33 Ultraschallmodul
Überblick
In dieser Lektion lernen Sie, wie Sie das Ultraschallmodul verwenden.
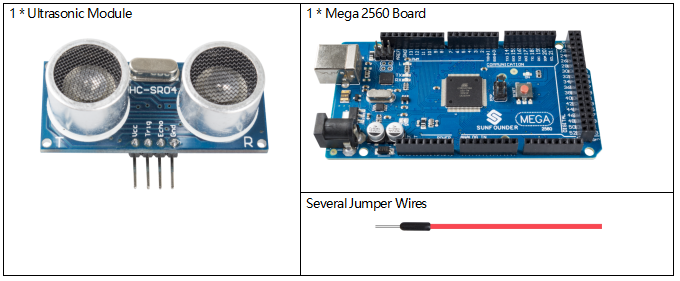
Erforderliche Komponenten
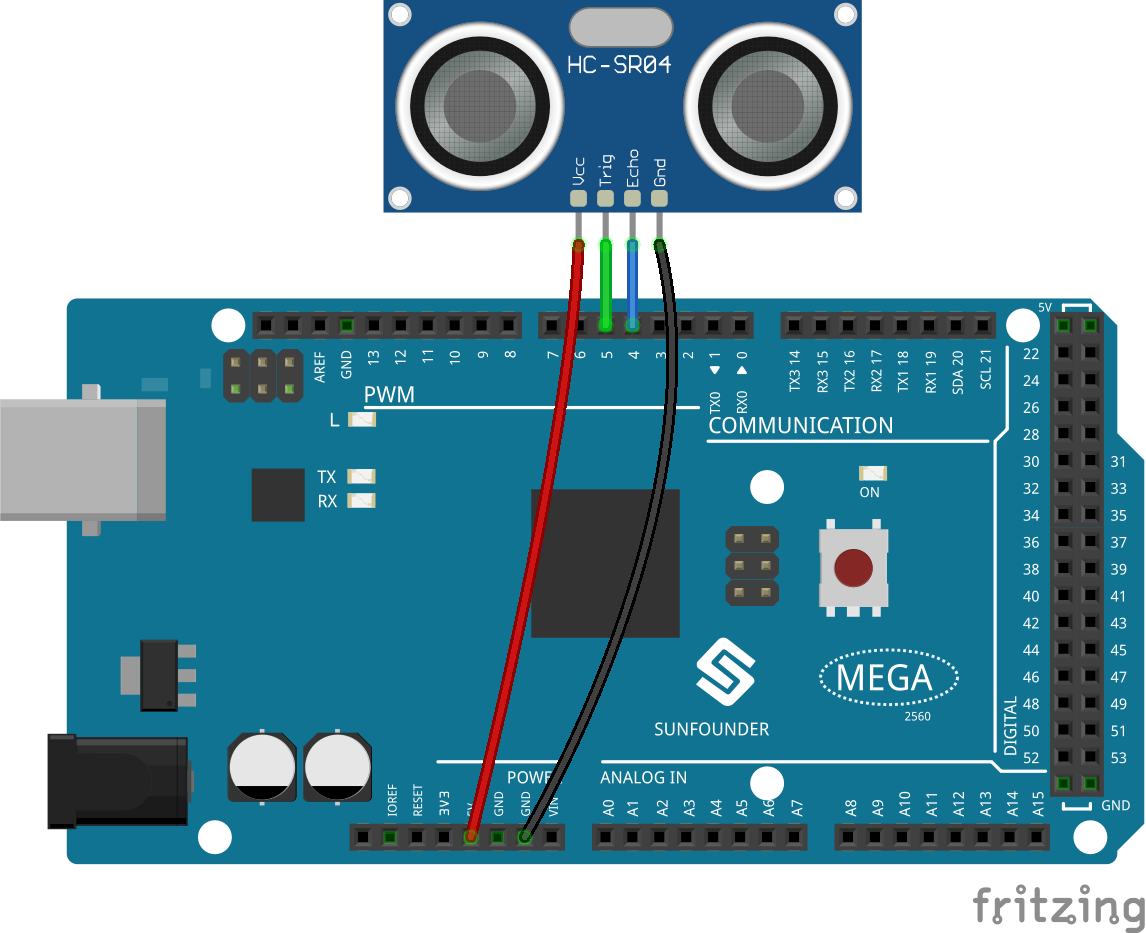
Fritzing-Schaltung
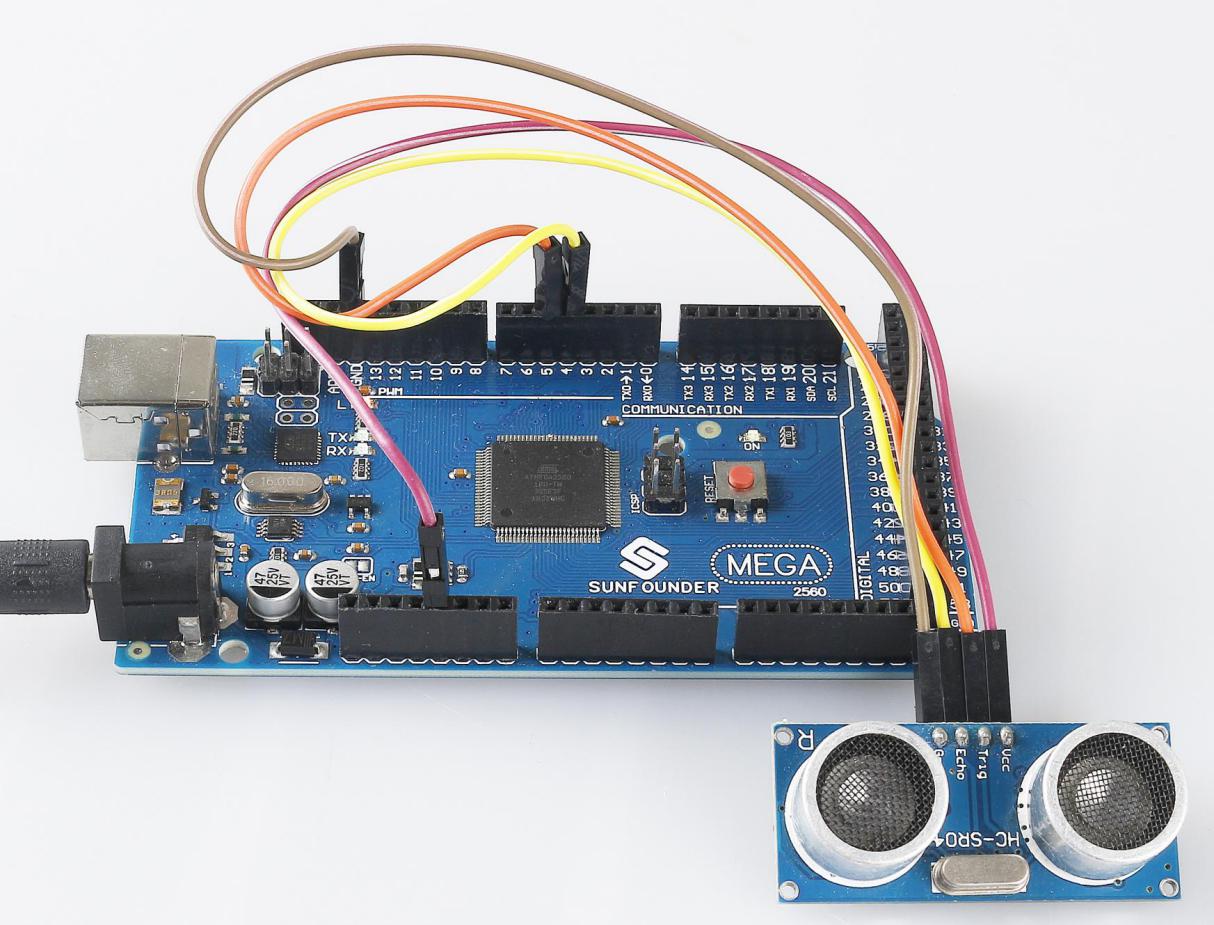
In diesem Beispiel verbinden wir die Pins des Ultraschallmoduls direkt mit den Pins des Mega 2560 Boards. Und dann bekommen wir VCC des Ultraschallmoduls mit 5V verbunden, GND mit GND, Trig mit dem digitalen Pin 5, Echo mit dem digitalen Pin 4.
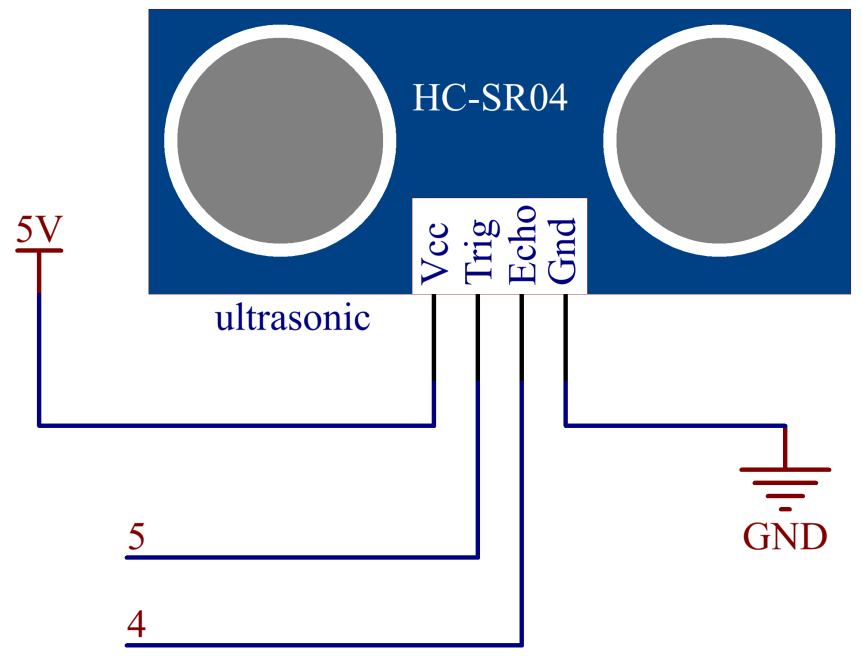
Schematische Darstellung
Code
Bemerkung
Sie können die Datei
2.33_ultrasonicModule.inounter dem Pfadsunfounder_vincent_kit_for_arduino\code\2.33_ultrasonicModuledirekt öffnen.Oder kopieren Sie diesen Code in Arduino IDE.
Nach dem Hochladen der Codes auf die Mega2560-Platine zeigt der serielle Monitor die Entfernung von Hindernissen an, die der Ultraschallsensor erkannt hat.
Code-Analyse
Über die Anwendung des Ultraschallsensors können wir die Unterfunktion direkt überprüfen.
float readSensorData(){// ...}
PING wird durch einen HIGH-Impuls von 2 oder mehr Mikrosekunden ausgelöst. (Geben Sie vorher einen kurzen LOW-Impuls, um einen sauberen HIGH-Impuls zu gewährleisten.)
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
Der Echo-Pin wird zum Lesen des Signals von PING verwendet, einem HIGH-Impuls, dessen Dauer die Zeit (in Mikrosekunden) vom Senden des Pings bis zum Empfang des Echos des Objekts ist.
microsecond=pulseIn(echoPin, HIGH);
Die Schallgeschwindigkeit beträgt 340 m/s oder 29 Mikrosekunden pro Zentimeter.
Dies ergibt die vom Ping zurückgelegte Entfernung, hin und zurück, also teilen wir durch 2, um die Entfernung des Hindernisses zu erhalten.
float distance = microsecond / 29.00 / 2;
Phänomen Bild