Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
2.25 Drehgebermodul
Überblick
In dieser Lektion lernen Sie den Drehgeber kennen. Ein Drehgeber ist ein elektronischer Schalter mit einer Reihe regelmäßiger Impulse in streng zeitlicher Abfolge. Wenn es mit IC verwendet wird, kann es inkrementieren, dekrementieren, Seiten umblättern und andere Operationen wie Scrollen mit der Maus, Menüauswahl und so weiter ausführen.
Erforderliche Komponenten
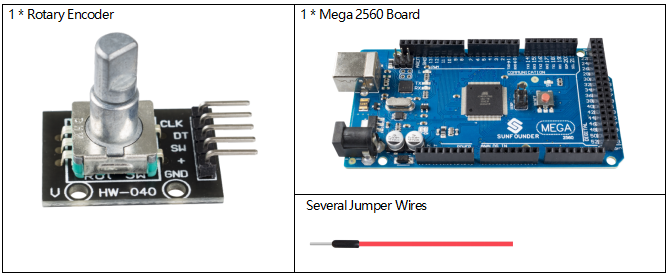
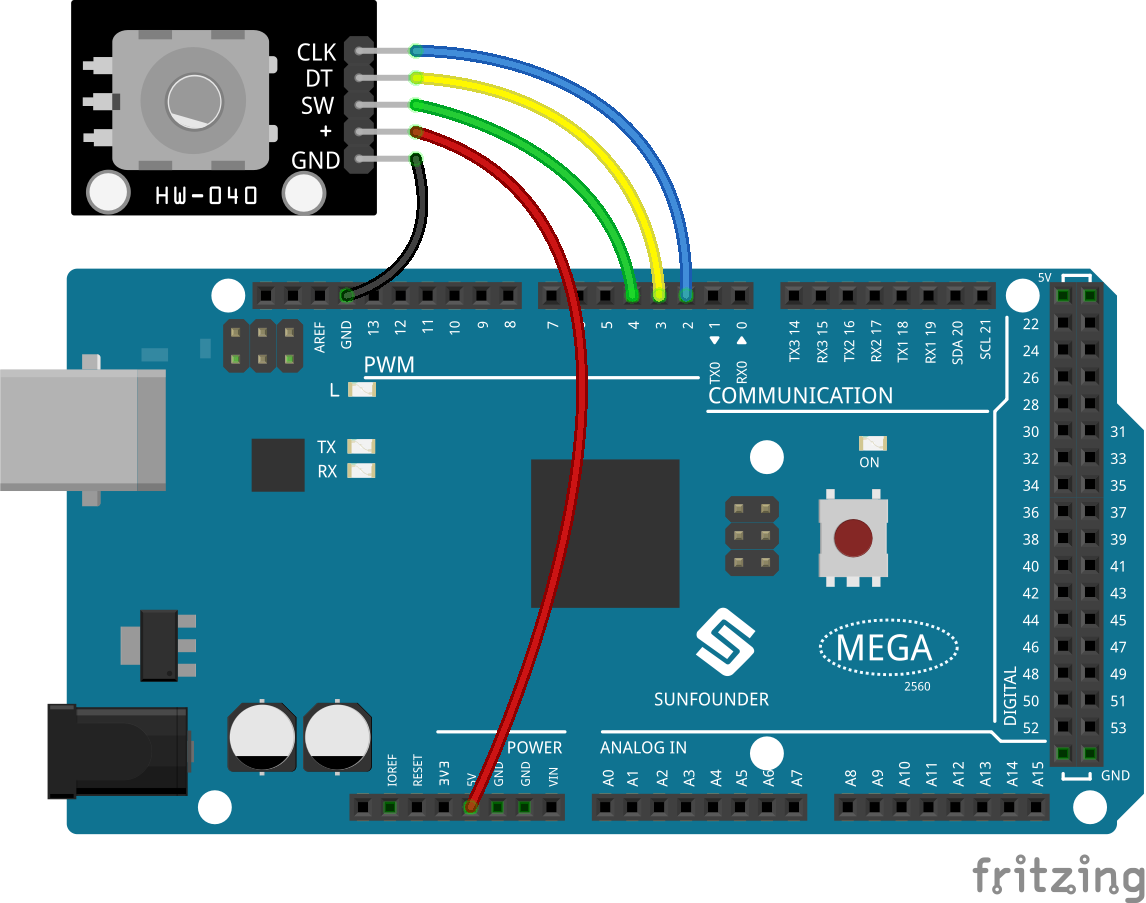
Fritzing-Schaltung
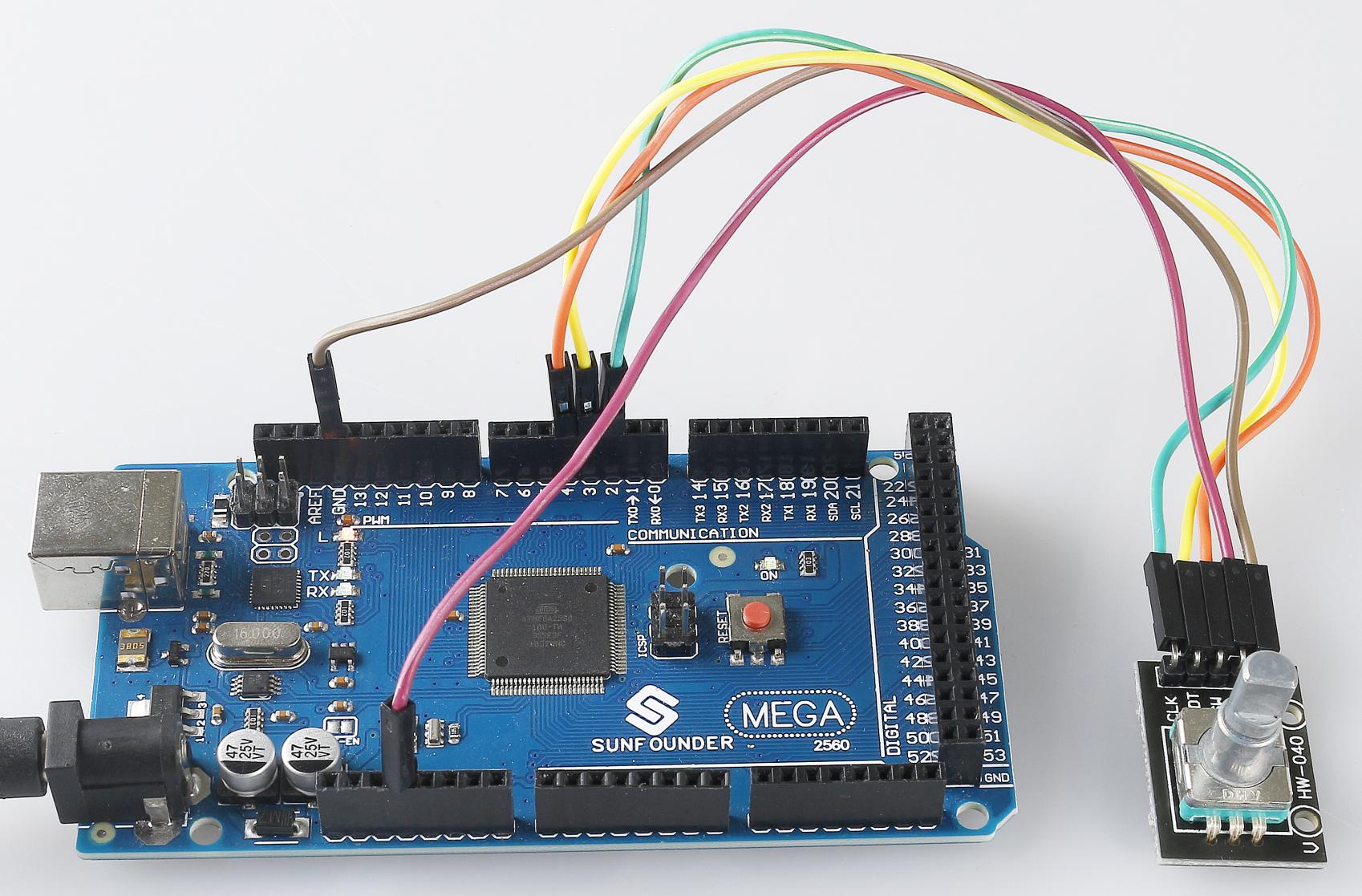
In diesem Beispiel können wir den Rotary Encoder Pin direkt mit dem Mega 2560 Board Pin verbinden, GND des Rotary Encoders mit GND verbinden, 「+」 mit 5V, SW mit Digital Pin 4, DT mit Digital Pin 3 und CLK mit Digitalstift 2.
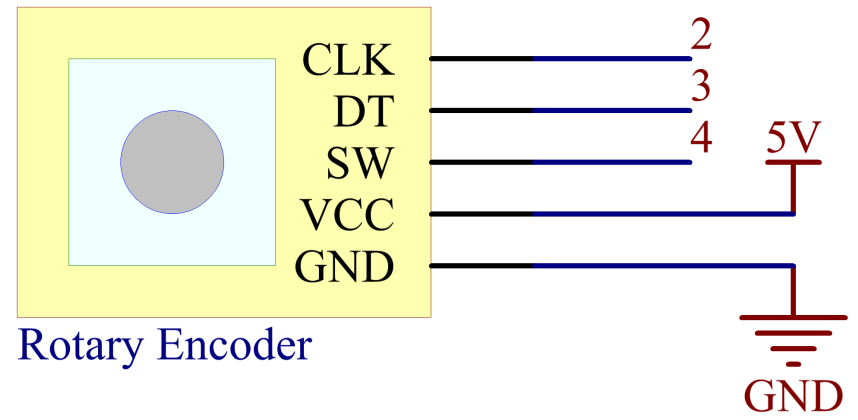
Schematische Darstellung
Code
Bemerkung
Sie können die Datei
2.25_rotaryEncoder.inounter dem Pfadsunfounder_vincent_kit_for_arduino\code\2.25_rotaryEncoderdirekt öffnen.Oder kopieren Sie diesen Code in Arduino IDE.
Sie sehen die Winkelverschiebung des Drehgebers, die auf Serial Monitor gedruckt wird. Wenn Sie den Drehgeber im Uhrzeigersinn drehen, wird die Winkelverschiebung erhöht; Wenn Sie ihn gegen den Uhrzeigersinn drehen, wird die Verschiebung verringert. Wenn Sie den Schalter am Drehgeber drücken, werden die Messwerte auf Null zurückgesetzt.
Code-Analyse
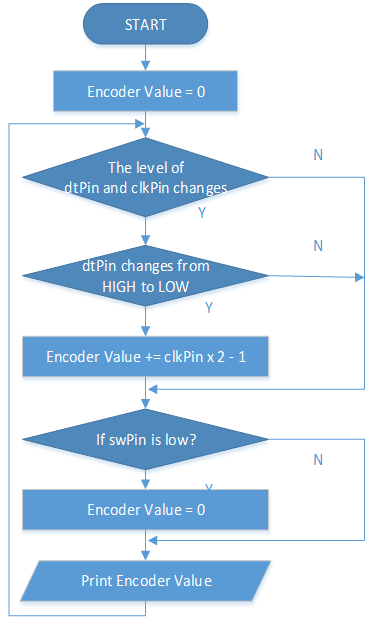
Wenn ein Drehgeber verwendet wird, treten die folgenden Pin-Pegel-Situationen auf.
Beim Drehen der Welle wechselt dtPin von High-Pegel auf Low-Pegel.
clkPin bleibt auf High-Pegel, wenn sich die Welle im Uhrzeigersinn dreht, andernfalls geht er auf Low-Pegel.
Wenn die Welle gedrückt wird, hat swPin einen niedrigen Pegel.
Daraus ist rechts der Programmablauf dargestellt.
Für eine detaillierte Analyse der möglichen Zustandsänderungsbeurteilung siehe 1.10 Zustandsänderungserkennung.
Phänomen Bild