Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
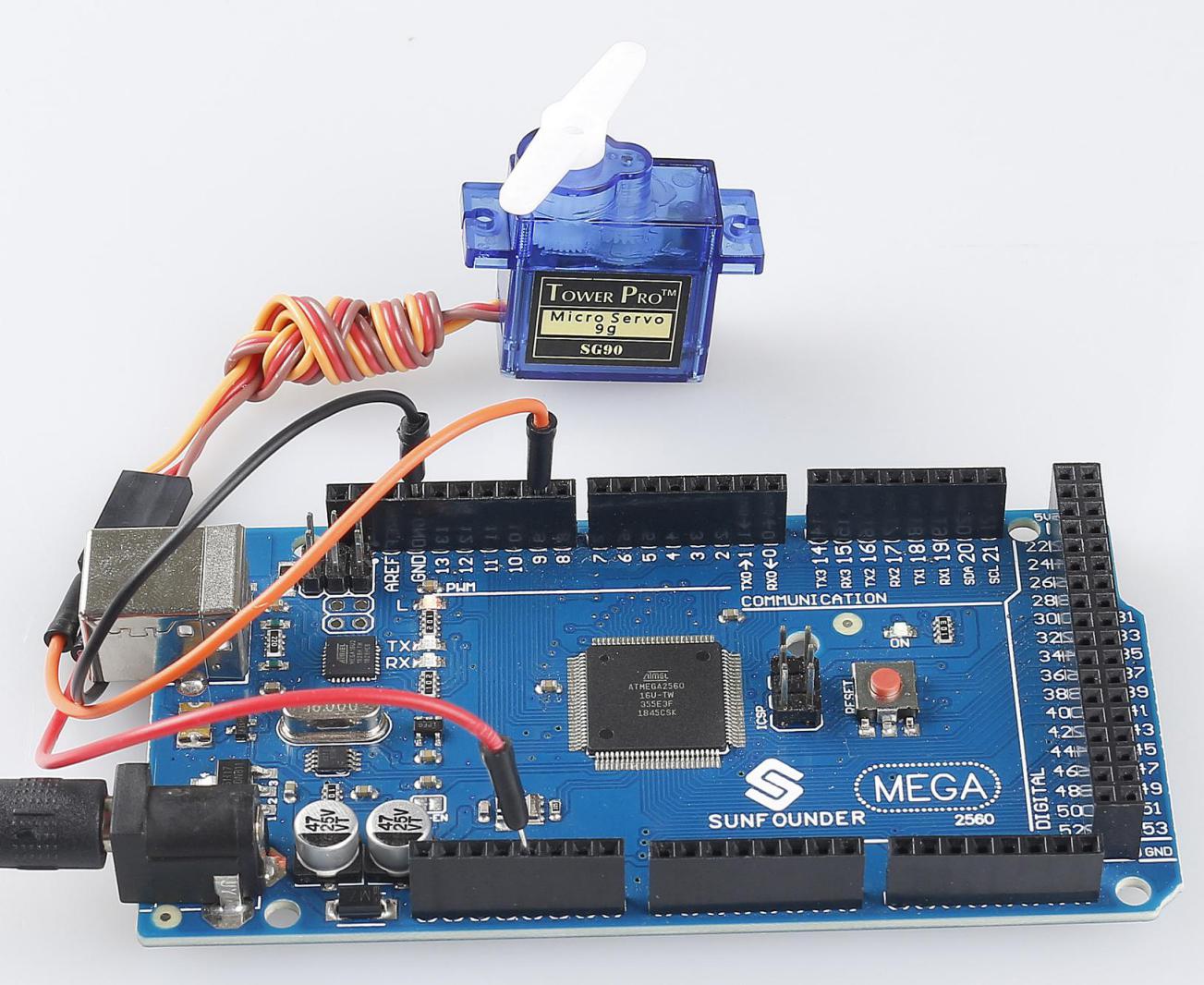
2.12 Servo
Überblick
In dieser Lektion werden Sie etwas über Servo lernen. Servo ist eine Art von Treiber, dessen Position (Winkel) einstellbar ist und beibehalten werden kann, oder ein Drehantrieb Aktuator, der eine präzise Steuerung der Winkelposition ermöglicht. Derzeit, wird er häufig in gehobenen ferngesteuerten Spielzeugen wie Flugzeugen, U-Booten U-Boot, Teleroboter und so weiter.
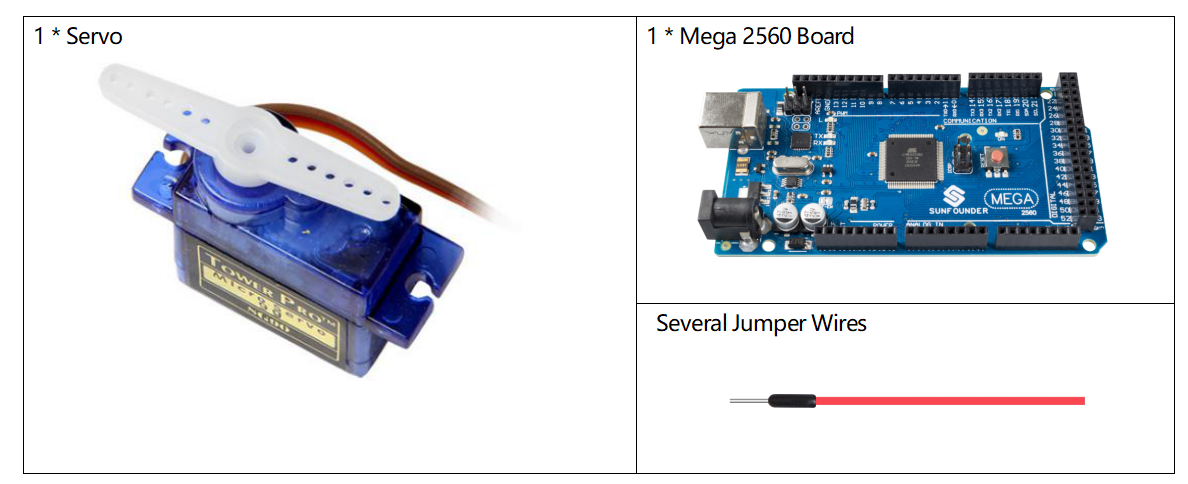
Erforderliche Komponenten
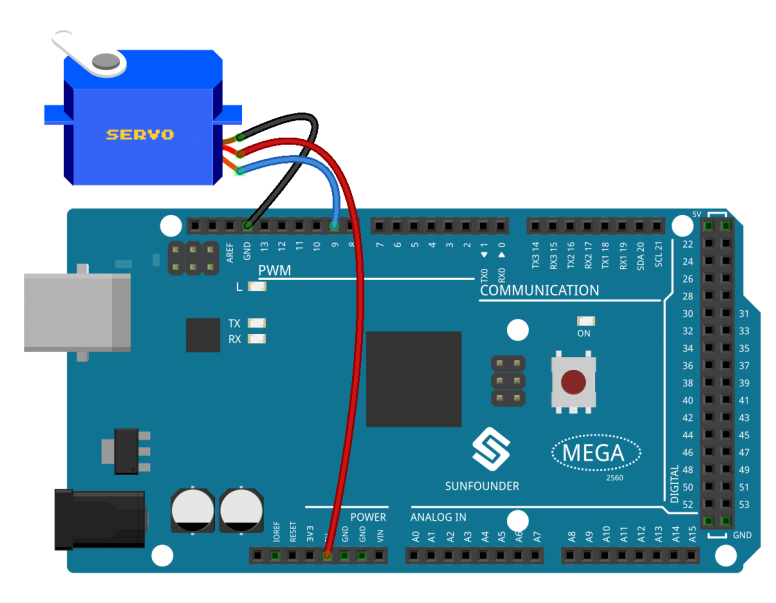
Fritzing-Schaltung
In diesem Beispiel verwenden wir PWM-Pin 9, um den Servo anzutreiben, und verbinden den orangefarbenen Draht des Servos mit dem PWM-Pin 9, den roten mit 5 V und den braunen mit GND.
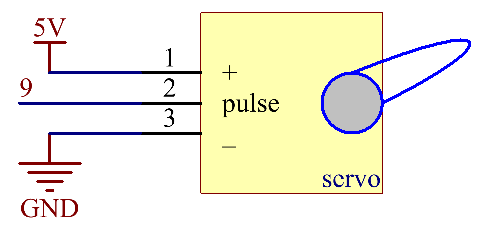
Schematische Darstellung
Code
Bemerkung
Sie können die Datei
2.12_servo.inounter dem Pfadsunfounder_vincent_kit_for_arduino\code\2.12_servodirekt öffnen.Oder kopieren Sie diesen Code in Arduino IDE.
Sobald Sie die Codes auf das Mega2560-Board hochgeladen haben, können Sie sehen, wie sich der Servoarm im Bereich von 0 ° ~ 180 ° dreht.
Code-Analyse
Durch den Aufruf der Bibliothek Servo.h können Sie das Servo einfach ansteuern.
#include <Servo.h>
Bibliotheksfunktionen:
Servo
Erstellen Sie ein Servo -Objekt, um einen Servo zu steuern.
uint8_t attach(int pin);
Verwandeln Sie einen Stift in einen Servotreiber. Ruft pinMode auf. Gibt bei einem Fehler 0 zurück.
void detach();
Lösen Sie einen Stift vom Servoantrieb.
void write(int value);
Stellen Sie den Winkel des Servos in Grad ein, 0 bis 180.
int read();
Gibt diesen Wert zurück, der mit dem letzten write() gesetzt wurde.
bool attached();
Geben Sie 1 zurück, wenn das Servo derzeit angeschlossen ist.
Phänomen Bild