Nota
¡Hola, bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi & Arduino & ESP32 en Facebook! Sumérgete más en Raspberry Pi, Arduino y ESP32 con otros entusiastas.
¿Por qué unirte?
Soporte Experto: Resuelve problemas post-venta y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y Comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Preestrenos Exclusivos: Obtén acceso anticipado a anuncios de nuevos productos y avances.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y Sorteos Festivos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
4.1.6 Alarma de Reversa
Introducción
En este proyecto, usaremos una pantalla LCD, un zumbador y sensores ultrasónicos para crear un sistema de asistencia de reversa. Podemos colocarlo en un vehículo controlado a distancia para simular el proceso real de reversa de un automóvil en el garaje.
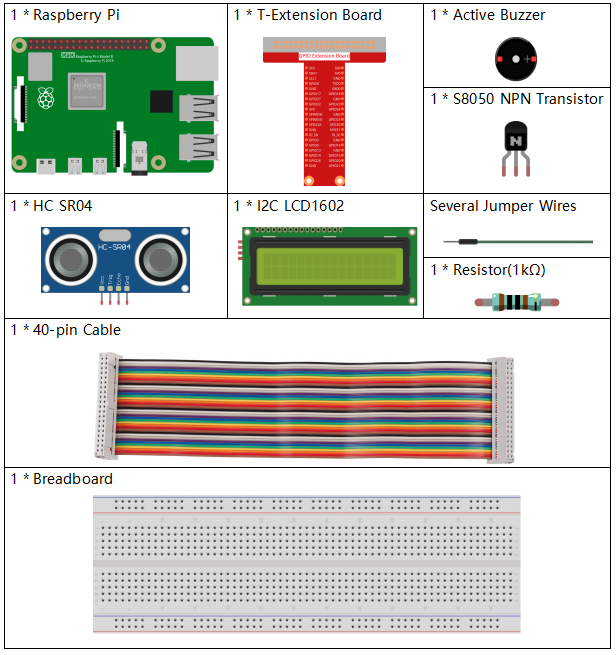
Componentes Necesarios
En este proyecto, necesitamos los siguientes componentes.
Es definitivamente conveniente comprar un kit completo, aquí está el enlace:
Nombre |
ARTÍCULOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Raphael |
337 |
También puedes comprarlos por separado desde los enlaces a continuación.
INTRODUCCIÓN DEL COMPONENTE |
ENLACE DE COMPRA |
|---|---|
- |
|
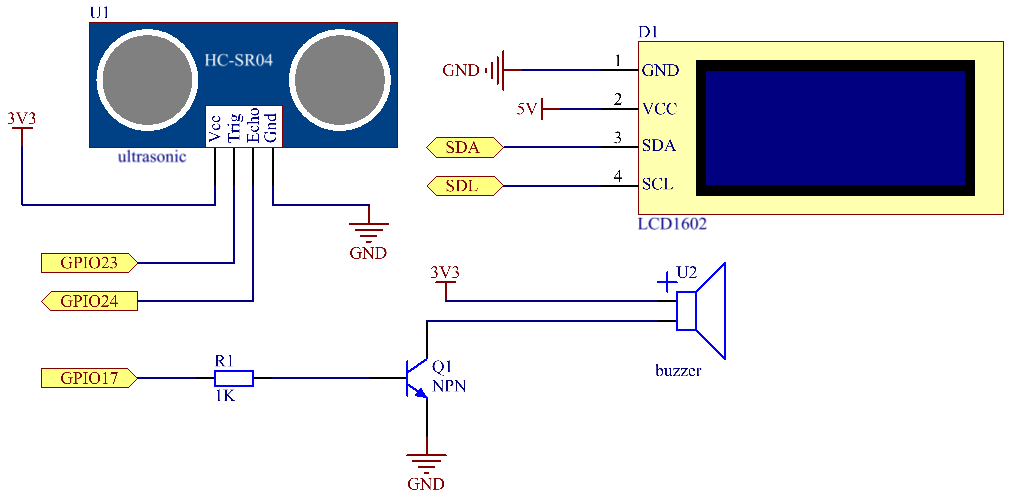
Diagrama Esquemático
El sensor ultrasónico detecta la distancia entre él y el obstáculo, la cual se mostrará en la pantalla LCD en forma de código. Al mismo tiempo, el sensor ultrasónico hace que el zumbador emita un sonido de advertencia de diferente frecuencia según el valor de la distancia.
Nombre T-Board |
física |
WiringPi |
BCM |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
GPIO17 |
Pin 11 |
0 |
17 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
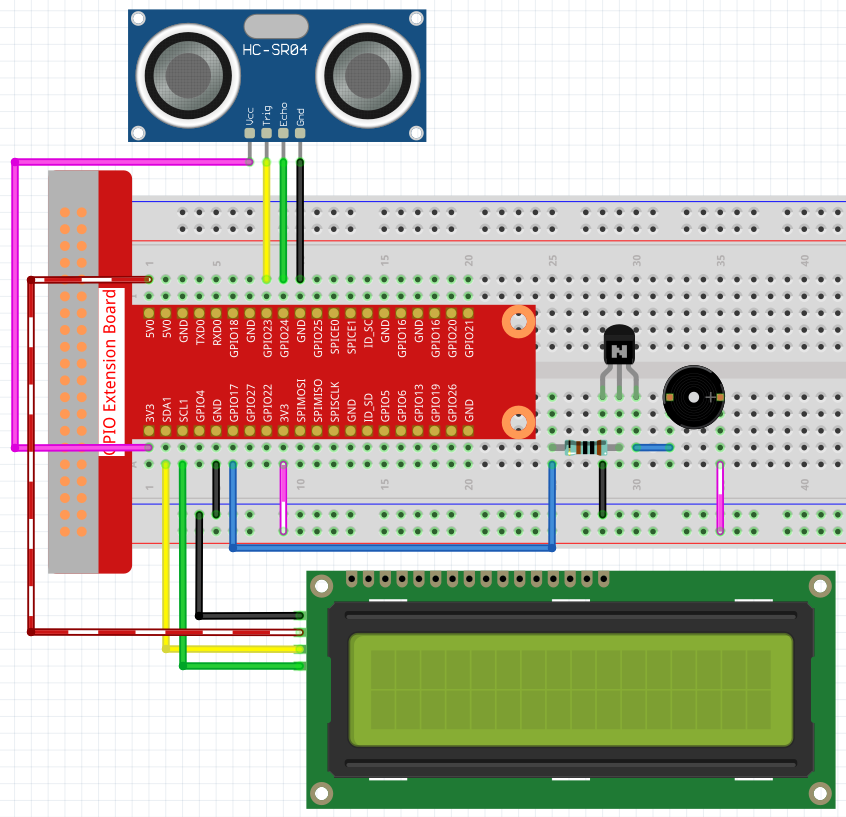
Procedimientos Experimentales
Paso 1: Construye el circuito.
Paso 2: Cambia de directorio.
cd ~/raphael-kit/python-pi5
Paso 3: Ejecuta.
sudo python3 4.1.9_ReversingAlarm_zero.py
A medida que se ejecuta el código, el módulo del sensor ultrasónico detecta la distancia al obstáculo y luego muestra la información sobre la distancia en el LCD1602; además, el zumbador emite un tono de advertencia cuya frecuencia cambia con la distancia.
Nota
Si obtienes el error
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1', necesitas referirte a Configuración de I²C para habilitar el I2C.Si obtienes el error
ModuleNotFoundError: No module named 'smbus2', por favor ejecutasudo apt install python3-smbus2.Si aparece el error
OSError: [Errno 121] Remote I/O error, significa que el módulo está mal conectado o está dañado.Si el código y el cableado están bien, pero la pantalla LCD aún no muestra contenido, puedes girar el potenciómetro en la parte trasera para aumentar el contraste.
Advertencia
Si recibe el mensaje de error RuntimeError: Cannot determine SOC peripheral base address, consulte Si «gpiozero» no funciona.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el código a continuación. Pero antes de eso, necesitas ir a la ruta del código fuente como raphael-kit/python-pi5. Después de modificar el código, puedes ejecutarlo directamente para ver el efecto.
#!/usr/bin/env python3
import LCD1602
import time
from gpiozero import DistanceSensor, Buzzer
# Inicializar el sensor ultrasónico con pines GPIO
sensor = DistanceSensor(echo=24, trigger=23) # El pin Echo es GPIO 24, el pin Trigger es GPIO 23
# Inicializar el zumbador conectado al pin GPIO 17
buzzer = Buzzer(17)
def lcdsetup():
# Inicializar la pantalla LCD con dirección I2C y habilitar la luz de fondo
LCD1602.init(0x27, 1) # 0x27 es la dirección I2C de la pantalla LCD
LCD1602.clear() # Limpiar la pantalla LCD
# Mostrar mensajes de inicio en la pantalla LCD
LCD1602.write(0, 0, 'Ultrasonic Starting')
LCD1602.write(1, 1, 'By SunFounder')
time.sleep(2) # Esperar 2 segundos
def distance():
# Calcular y devolver la distancia medida por el sensor
dis = sensor.distance * 100 # Convertir distancia a centímetros
print('Distance: {:.2f} cm'.format(dis)) # Imprimir distancia con dos decimales
time.sleep(0.3) # Esperar 0.3 segundos antes de la siguiente medición
return dis
def loop():
# Medir continuamente la distancia y actualizar la pantalla LCD y el zumbador
while True:
dis = distance() # Obtener la distancia actual
# Mostrar la distancia y manejar las alertas basadas en la distancia
if dis > 400: # Comprobar si la distancia está fuera de rango
LCD1602.clear()
LCD1602.write(0, 0, 'Error')
LCD1602.write(3, 1, 'Out of range')
time.sleep(0.5)
else:
# Mostrar la distancia actual en la pantalla LCD
LCD1602.clear()
LCD1602.write(0, 0, 'Distance is')
LCD1602.write(5, 1, str(round(dis, 2)) + ' cm')
# Ajustar la frecuencia del zumbador según la distancia
if dis >= 50:
time.sleep(0.5)
elif 20 < dis < 50:
# Distancia media: frecuencia media del zumbador
for _ in range(2):
buzzer.on()
time.sleep(0.05)
buzzer.off()
time.sleep(0.2)
elif dis <= 20:
# Distancia cercana: alta frecuencia del zumbador
for _ in range(5):
buzzer.on()
time.sleep(0.05)
buzzer.off()
time.sleep(0.05)
try:
lcdsetup() # Configurar la pantalla LCD
loop() # Iniciar el bucle de medición
except KeyboardInterrupt:
# Apagar el zumbador y limpiar la pantalla LCD en caso de interrupción del usuario (por ejemplo, Ctrl+C)
buzzer.off()
LCD1602.clear()
Explicación del Código
Este script utiliza varias bibliotecas para su funcionalidad. La biblioteca
LCD1602gestiona la pantalla LCD, mientras quetimeproporciona funciones relacionadas con el tiempo. La bibliotecagpiozeroes esencial para las interacciones con los pines GPIO de Raspberry Pi, particularmente para operar el DistanceSensor y el Buzzer.#!/usr/bin/env python3 import LCD1602 import time from gpiozero import DistanceSensor, Buzzer
El sensor ultrasónico se configura con sus pines de eco y disparo conectados a los pines GPIO 24 y 23, respectivamente. Además, un zumbador está conectado al pin GPIO 17.
# Inicializar el sensor ultrasónico con pines GPIO sensor = DistanceSensor(echo=24, trigger=23) # El pin Echo es GPIO 24, el pin Trigger es GPIO 23 # Inicializar el zumbador conectado al pin GPIO 17 buzzer = Buzzer(17)
La inicialización de la pantalla LCD implica limpiarla y mostrar un mensaje de inicio.
def lcdsetup(): # Inicializar la pantalla LCD con dirección I2C y habilitar la luz de fondo LCD1602.init(0x27, 1) # 0x27 es la dirección I2C de la pantalla LCD LCD1602.clear() # Limpiar la pantalla LCD # Mostrar mensajes de inicio en la pantalla LCD LCD1602.write(0, 0, 'Ultrasonic Starting') LCD1602.write(1, 1, 'By SunFounder') time.sleep(2) # Esperar 2 segundos
La función
distancecalcula la distancia medida por el sensor ultrasónico y la muestra, devolviendo el valor en centímetros.def distance(): # Calcular y devolver la distancia medida por el sensor dis = sensor.distance * 100 # Convertir distancia a centímetros print('Distance: {:.2f} cm'.format(dis)) # Imprimir distancia con dos decimales time.sleep(0.3) # Esperar 0.3 segundos antes de la siguiente medición return dis
El bucle principal mide continuamente la distancia, actualizando tanto la pantalla LCD como el zumbador. Maneja diferentes rangos de distancia con acciones específicas, como mostrar mensajes de error o variar las frecuencias del zumbador según la distancia medida.
def loop(): # Medir continuamente la distancia y actualizar la pantalla LCD y el zumbador while True: dis = distance() # Obtener la distancia actual # Mostrar la distancia y manejar las alertas basadas en la distancia if dis > 400: # Comprobar si la distancia está fuera de rango LCD1602.clear() LCD1602.write(0, 0, 'Error') LCD1602.write(3, 1, 'Out of range') time.sleep(0.5) else: # Mostrar la distancia actual en la pantalla LCD LCD1602.clear() LCD1602.write(0, 0, 'Distance is') LCD1602.write(5, 1, str(round(dis, 2)) + ' cm') # Ajustar la frecuencia del zumbador según la distancia if dis >= 50: time.sleep(0.5) elif 20 < dis < 50: # Distancia media: frecuencia media del zumbador for _ in range(2): buzzer.on() time.sleep(0.05) buzzer.off() time.sleep(0.2) elif dis <= 20: # Distancia cercana: alta frecuencia del zumbador for _ in range(5): buzzer.on() time.sleep(0.05) buzzer.off() time.sleep(0.05)
Al ejecutarse, el script configura la pantalla LCD y entra en el bucle principal. Puede ser interrumpido con un comando de teclado (Ctrl+C), que apaga el zumbador y limpia la pantalla LCD.
try: lcdsetup() # Configurar la pantalla LCD loop() # Iniciar el bucle de medición except KeyboardInterrupt: # Apagar el zumbador y limpiar la pantalla LCD en caso de interrupción del usuario (por ejemplo, Ctrl+C) buzzer.off() LCD1602.clear()