Nota
¡Hola! Bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook. Profundiza en Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirte?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances exclusivos: Obtén acceso anticipado a anuncios de nuevos productos y adelantos exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más nuevos.
Promociones y sorteos festivos: Participa en sorteos y promociones durante las festividades.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
4.1.5 Bienvenida
Introducción
En este proyecto, utilizaremos un sensor PIR para detectar el movimiento de los peatones y usaremos servos, LED y un zumbador para simular el funcionamiento de la puerta automática de una tienda de conveniencia. Cuando un peatón aparezca dentro del rango de detección del PIR, la luz indicadora se encenderá, la puerta se abrirá y el zumbador reproducirá un timbre de apertura.
Componentes necesarios
En este proyecto, necesitamos los siguientes componentes.
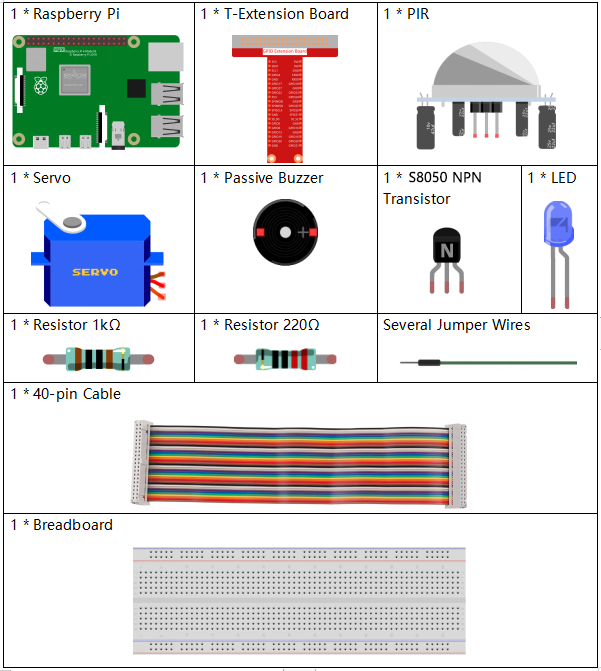
Es definitivamente conveniente comprar un kit completo, aquí tienes el enlace:
Nombre |
ELEMENTOS EN ESTE KIT |
ENLACE |
|---|---|---|
Kit Raphael |
337 |
También puedes comprarlos por separado en los enlaces a continuación.
INTRODUCCIÓN DEL COMPONENTE |
ENLACE DE COMPRA |
|---|---|
- |
|
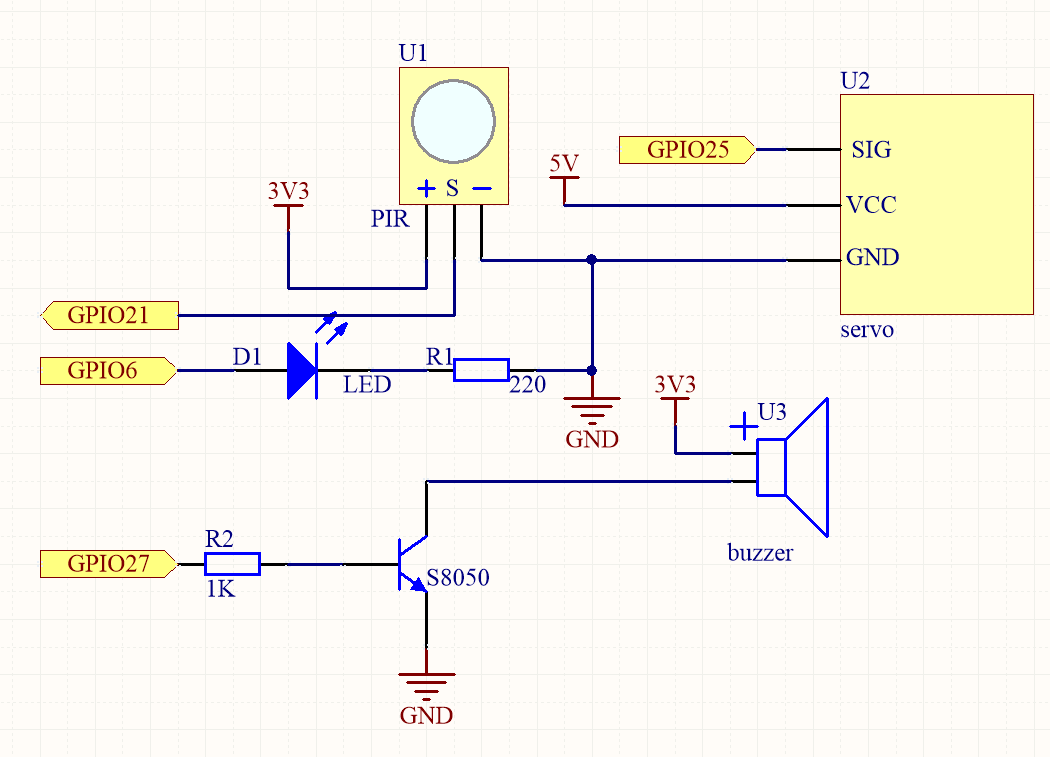
Diagrama Esquemático
Nombre de la T-Board |
física |
wiringPi |
BCM |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
Procedimientos Experimentales
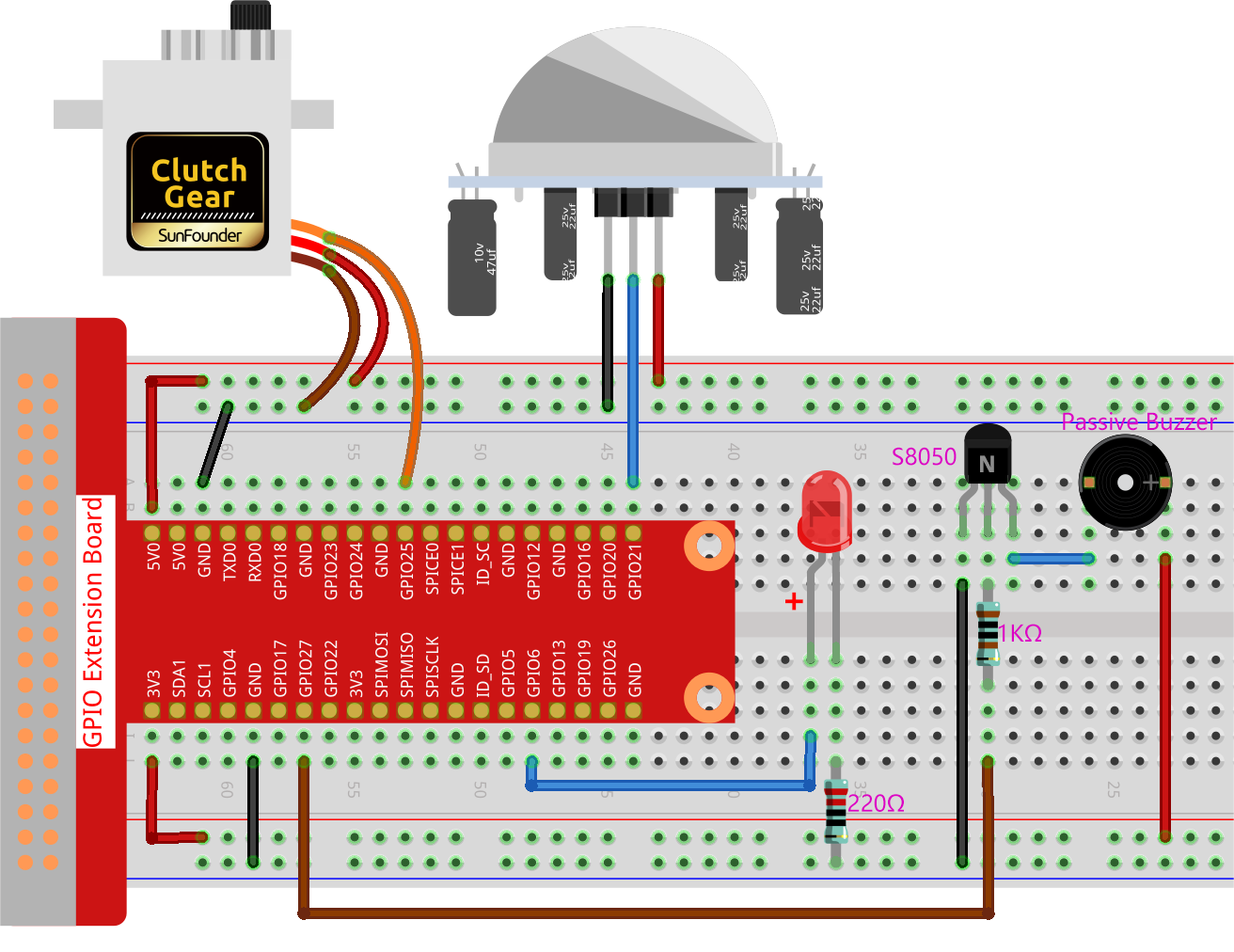
Paso 1: Monta el circuito.
Paso 2: Cambia de directorio.
cd ~/raphael-kit/python-pi5
Paso 3: Ejecuta.
sudo python3 4.1.8_Welcome_zero.py
Después de ejecutar el código, si el sensor PIR detecta que alguien pasa, la puerta se abrirá automáticamente (simulada por el servo), se encenderá la luz indicadora y sonará el timbre de la puerta. Una vez que el timbre suene, el sistema cerrará automáticamente la puerta y apagará la luz indicadora, esperando a que alguien pase de nuevo.
Hay dos potenciómetros en el módulo PIR: uno para ajustar la sensibilidad y otro para ajustar la distancia de detección. Para que el módulo PIR funcione mejor, debes girar ambos en sentido antihorario hasta el final.

Advertencia
Si recibe el mensaje de error RuntimeError: Cannot determine SOC peripheral base address, consulte Si «gpiozero» no funciona.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el código a continuación. Pero antes de eso, debes ir a la ruta del código fuente como raphael-kit/python-pi5. Después de modificar el código, puedes ejecutarlo directamente para ver el efecto.
#!/usr/bin/env python3
from gpiozero import LED, MotionSensor, Servo, TonalBuzzer
import time
# Configuración de pines GPIO para LED, sensor de movimiento (PIR) y zumbador
ledPin = LED(6)
pirPin = MotionSensor(21)
buzPin = TonalBuzzer(27)
# Factor de corrección de ancho de pulso del motor servo y cálculo
myCorrection = 0.45
maxPW = (2.0 + myCorrection) / 1000 # Ancho de pulso máximo
minPW = (1.0 - myCorrection) / 1000 # Ancho de pulso mínimo
# Inicializar servo con anchos de pulso personalizados
servoPin = Servo(25, min_pulse_width=minPW, max_pulse_width=maxPW)
# Melodía musical para el zumbador, con notas y duraciones
tune = [('C#4', 0.2), ('D4', 0.2), (None, 0.2),
('Eb4', 0.2), ('E4', 0.2), (None, 0.6),
('F#4', 0.2), ('G4', 0.2), (None, 0.6),
('Eb4', 0.2), ('E4', 0.2), (None, 0.2),
('F#4', 0.2), ('G4', 0.2), (None, 0.2),
('C4', 0.2), ('B4', 0.2), (None, 0.2),
('F#4', 0.2), ('G4', 0.2), (None, 0.2),
('B4', 0.2), ('Bb4', 0.5), (None, 0.6),
('A4', 0.2), ('G4', 0.2), ('E4', 0.2),
('D4', 0.2), ('E4', 0.2)]
def setAngle(angle):
"""
Move the servo to a specified angle.
:param angle: Angle in degrees (0-180).
"""
value = float(angle / 180) # Convertir ángulo a valor de servo
servoPin.value = value # Establecer posición del servo
time.sleep(0.001) # Breve pausa para el movimiento del servo
def doorbell():
"""
Play a musical tune using the buzzer.
"""
for note, duration in tune:
buzPin.play(note) # Reproducir la nota
time.sleep(float(duration)) # Duración de la nota
buzPin.stop() # Detener el zumbador después de la melodía
def closedoor():
# Apaga el LED y mueve el servo para cerrar la puerta
ledPin.off()
for i in range(180, -1, -1):
setAngle(i) # Mover servo de 180 a 0 grados
time.sleep(0.001) # Breve pausa para movimiento suave
time.sleep(1) # Esperar después de cerrar la puerta
def opendoor():
# Encender LED, abrir puerta (mover servo), reproducir melodía, cerrar puerta
ledPin.on()
for i in range(0, 181):
setAngle(i) # Mover servo de 0 a 180 grados
time.sleep(0.001) # Breve pausa para movimiento suave
time.sleep(1) # Esperar antes de reproducir la melodía
doorbell() # Reproducir la melodía del timbre
closedoor() # Cerrar la puerta después de la melodía
def loop():
# Bucle principal para verificar movimiento y operar la puerta
while True:
if pirPin.motion_detected:
opendoor() # Abrir puerta si se detecta movimiento
time.sleep(0.1) # Breve pausa en el bucle
try:
loop()
except KeyboardInterrupt:
# Limpiar GPIO al interrumpir el usuario (por ejemplo, Ctrl+C)
buzPin.stop()
ledPin.off()
Explicación del Código
El script comienza importando los módulos necesarios. La biblioteca
gpiozerose utiliza para interactuar con el LED, el sensor de movimiento, el motor servo y el zumbador tonal. El módulotimese utiliza para funciones relacionadas con el tiempo.#!/usr/bin/env python3 from gpiozero import LED, MotionSensor, Servo, TonalBuzzer import time
Inicializa el LED, el sensor de movimiento PIR y el zumbador tonal en sus respectivos pines GPIO.
# Configuración de pines GPIO para LED, sensor de movimiento (PIR) y zumbador ledPin = LED(6) pirPin = MotionSensor(21) buzPin = TonalBuzzer(27)
Calcula los anchos de pulso máximos y mínimos para el motor servo, incorporando un factor de corrección para un ajuste fino.
# Factor de corrección de ancho de pulso del motor servo y cálculo myCorrection = 0.45 maxPW = (2.0 + myCorrection) / 1000 # Ancho de pulso máximo minPW = (1.0 - myCorrection) / 1000 # Ancho de pulso mínimo
Inicializa el motor servo en el pin GPIO 25 con los anchos de pulso personalizados para una posición precisa.
# Inicializar servo con anchos de pulso personalizados servoPin = Servo(25, min_pulse_width=minPW, max_pulse_width=maxPW)
La melodía se define como una secuencia de notas (frecuencia) y duraciones (segundos).
# Melodía musical para el zumbador, con notas y duraciones tune = [('C#4', 0.2), ('D4', 0.2), (None, 0.2), ('Eb4', 0.2), ('E4', 0.2), (None, 0.6), ('F#4', 0.2), ('G4', 0.2), (None, 0.6), ('Eb4', 0.2), ('E4', 0.2), (None, 0.2), ('F#4', 0.2), ('G4', 0.2), (None, 0.2), ('C4', 0.2), ('B4', 0.2), (None, 0.2), ('F#4', 0.2), ('G4', 0.2), (None, 0.2), ('B4', 0.2), ('Bb4', 0.5), (None, 0.6), ('A4', 0.2), ('G4', 0.2), ('E4', 0.2), ('D4', 0.2), ('E4', 0.2)]
Función para mover el servo a un ángulo especificado. Convierte el ángulo a un valor entre 0 y 1 para el servo.
def setAngle(angle): """ Move the servo to a specified angle. :param angle: Angle in degrees (0-180). """ value = float(angle / 180) # Convertir ángulo a valor de servo servoPin.value = value # Establecer posición del servo time.sleep(0.001) # Breve pausa para el movimiento del servo
Función para reproducir una melodía musical utilizando el zumbador. Itera a través de la lista
tune, reproduciendo cada nota por su duración especificada.def doorbell(): """ Play a musical tune using the buzzer. """ for note, duration in tune: buzPin.play(note) # Reproducir la nota time.sleep(float(duration)) # Duración de la nota buzPin.stop() # Detener zumbador después de la melodía
Funciones para abrir y cerrar la puerta utilizando el motor servo. La función
opendoorenciende el LED, abre la puerta, reproduce la melodía y luego cierra la puerta.def closedoor(): # Apaga el LED y mueve el servo para cerrar la puerta ledPin.off() for i in range(180, -1, -1): setAngle(i) # Mover servo de 180 a 0 grados time.sleep(0.001) # Breve pausa para movimiento suave time.sleep(1) # Esperar después de cerrar la puerta def opendoor(): # Encender LED, abrir puerta (mover servo), reproducir melodía, cerrar puerta ledPin.on() for i in range(0, 181): setAngle(i) # Mover servo de 0 a 180 grados time.sleep(0.001) # Breve pausa para movimiento suave time.sleep(1) # Esperar antes de reproducir la melodía doorbell() # Reproducir la melodía del timbre closedoor() # Cerrar la puerta después de la melodía
Bucle principal que verifica constantemente la detección de movimiento. Cuando se detecta movimiento, se activa la función
opendoor.def loop(): # Bucle principal para verificar movimiento y operar la puerta while True: if pirPin.motion_detected: opendoor() # Abrir puerta si se detecta movimiento time.sleep(0.1) # Breve pausa en el bucle
Ejecuta el bucle principal y asegura que el script se pueda detener con un comando de teclado (Ctrl+C), apagando el zumbador y el LED para una salida limpia.
try: loop() except KeyboardInterrupt: # Limpiar GPIO al interrumpir el usuario (por ejemplo, Ctrl+C) buzPin.stop() ledPin.off()