Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauche tiefer in Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten ein.
Warum beitreten?
Expertenunterstützung: Löse Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tausche Tipps und Tutorials aus, um deine Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalte frühzeitigen Zugang zu neuen Produktankündigungen und Vorschauen.
Sonderrabatte: Genieße exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nimm an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu erkunden und zu kreieren? Klicke [hier] und tritt noch heute bei!
4.1.10 Intelligenter Ventilator (MCP3008)
Bemerkung
Je nach deiner Kit-Version überprüfe bitte, ob du ADC0834 oder MCP3008 hast, und fahre mit dem entsprechenden Abschnitt fort.
Einführung
In diesem Projekt verwenden wir Motoren, Taster und Thermistoren, um einen manuellen + automatischen intelligenten Ventilator zu bauen, dessen Windgeschwindigkeit einstellbar ist.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
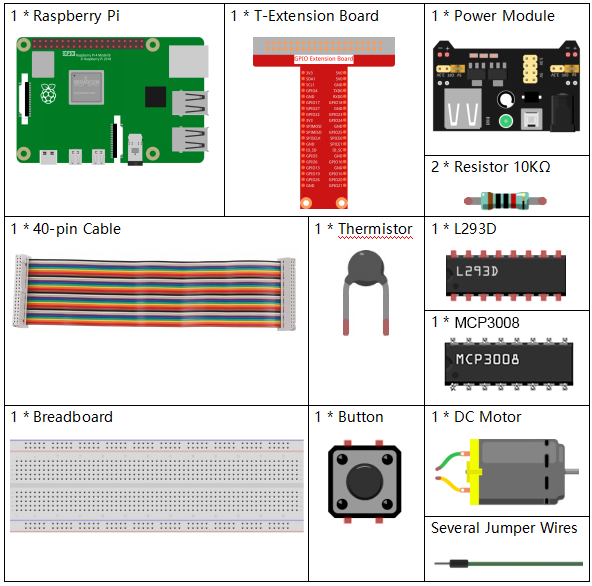
Es ist auf jeden Fall praktisch, ein komplettes Kit zu kaufen. Hier ist der Link:
Name |
ENTHALTENE ARTIKEL |
LINK |
|---|---|---|
Raphael Kit |
337 |
Du kannst die Komponenten auch einzeln über die folgenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUFLINK |
|---|---|
- |
|
- |
|
- |
|
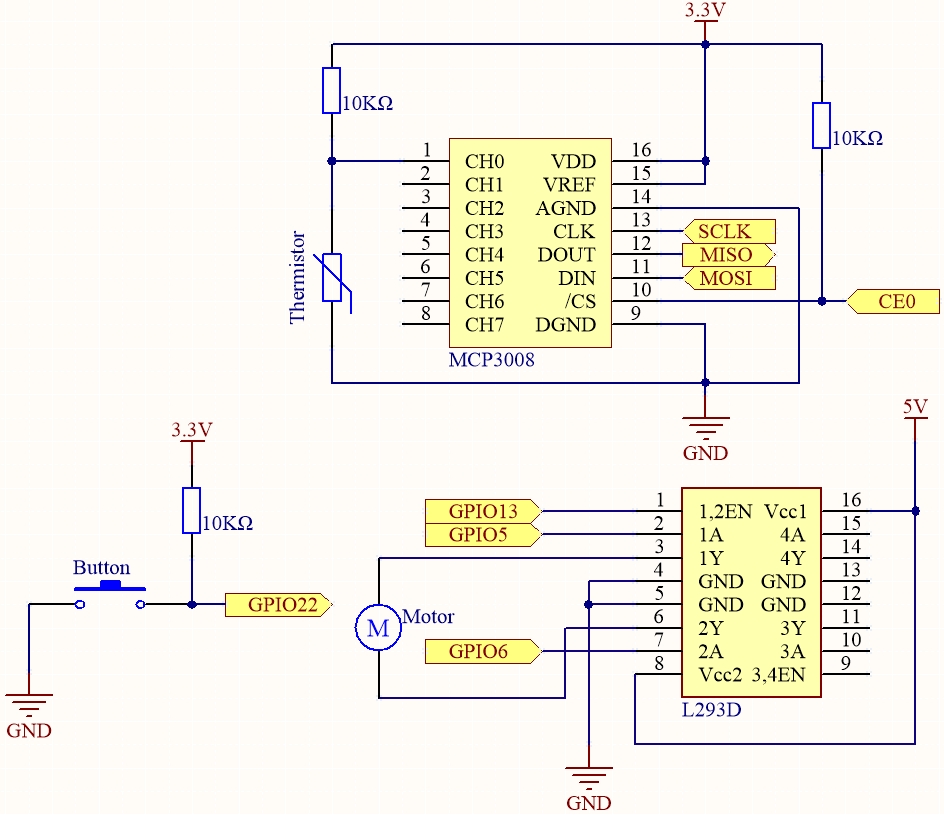
Schaltplan
T-Board-Name |
physical |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
Experimentelle Schritte
Schritt 1: Baue die Schaltung auf.
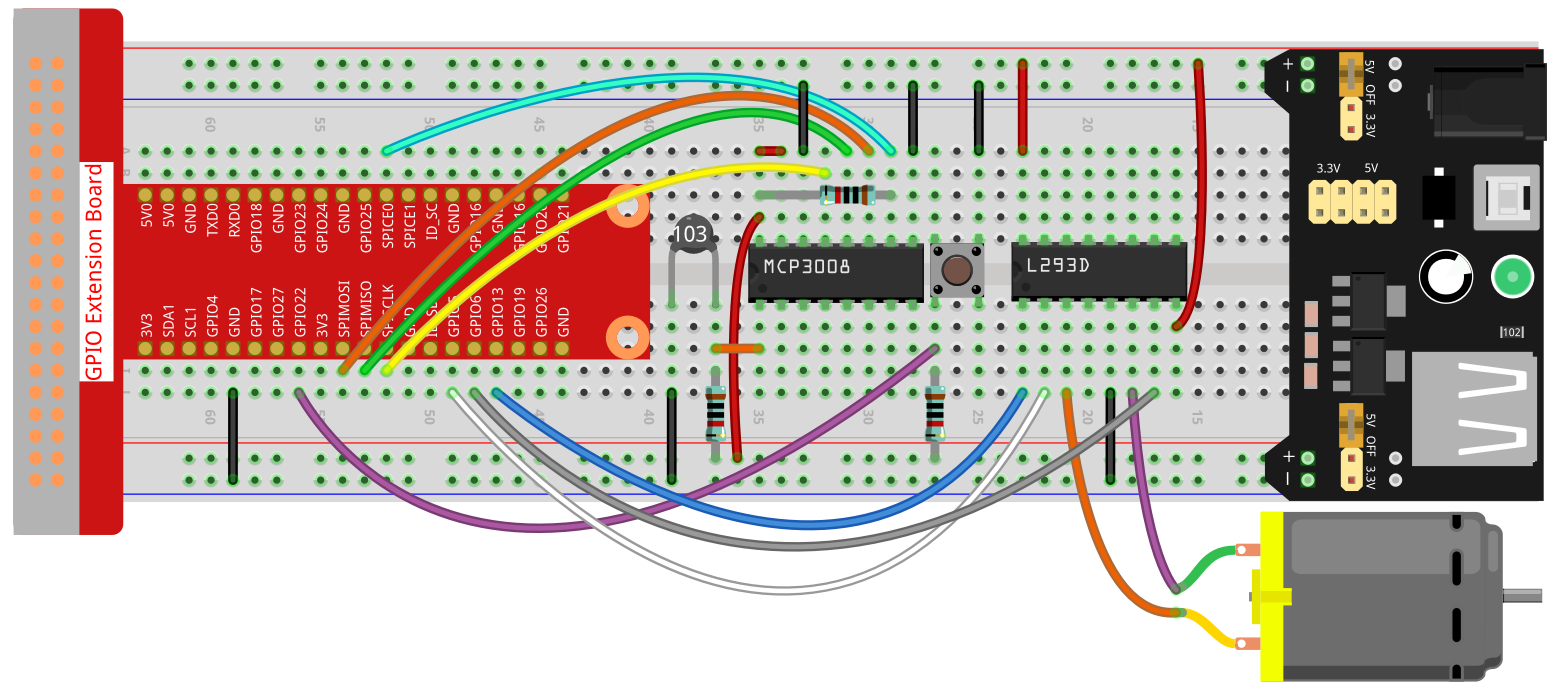
Bemerkung
Das Netzmodul kann mit einer 9V-Batterie und dem 9V-Batterieanschluss aus dem Kit betrieben werden. Stecke den Jumper des Netzmoduls in die 5V-Stromschienen des Breadboards.

Schritt 2: Richte die SPI-Schnittstelle ein und installiere die spidev-Bibliothek (siehe SPI-Konfiguration für detaillierte Anweisungen). Wenn du diese Schritte bereits abgeschlossen hast, kannst du diesen Schritt überspringen.
Schritt 3: Wechsle in den Ordner mit dem Code.
cd ~/raphael-kit/python
Schritt 4: Führe den Code aus.
sudo python3 4.1.10-2_SmartFan.py
Während der Code läuft, starte den Ventilator, indem du den Knopf drückst. Bei jedem Drücken wird eine Geschwindigkeitsstufe hoch- oder runtergeschaltet. Es gibt 5 Geschwindigkeitsstufen: 0~4. Wenn die 4. Stufe erreicht ist und der Knopf erneut gedrückt wird, stoppt der Ventilator bei Windstufe 0.
Sobald sich die Temperatur um mehr als 2 °C ändert, wird die Geschwindigkeit automatisch um eine Stufe erhöht oder verringert.
Code
Bemerkung
Du kannst den untenstehenden Code Bearbeiten/Zurücksetzen/Kopieren/Ausführen/Stoppen.
Wechsle vorher in den Quellcodepfad wie raphael-kit/python.
Nach dem Ändern kannst du den Code direkt ausführen, um das Ergebnis zu sehen.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import spidev
import time
import math
# Pin-Konfiguration
BTN_PIN = 22 # Taster
MOTOR_IN1 = 5 # Motor vorwärts
MOTOR_IN2 = 6 # Motor rückwärts
MOTOR_EN = 13 # PWM-Pin
# GPIO einrichten
GPIO.setmode(GPIO.BCM)
GPIO.setup(BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(MOTOR_IN1, GPIO.OUT)
GPIO.setup(MOTOR_IN2, GPIO.OUT)
GPIO.setup(MOTOR_EN, GPIO.OUT)
# PWM für Motorsteuerung
pwm = GPIO.PWM(MOTOR_EN, 1000) # 1kHz
pwm.start(0)
# SPI initialisieren (MCP3008)
spi = spidev.SpiDev()
spi.open(0, 0) # Bus 0, CE0
spi.max_speed_hz = 1000000 # 1 MHz
# Globale Variablen
level = 0
currentTemp = 0
markTemp = 0
def read_adc(channel):
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def temperature():
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0
Rt = 10000.0 * Vr / (3.3 - Vr)
tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0)))
Cel = tempK - 273.15
return Cel
def motor_run(level):
if level == 0:
GPIO.output(MOTOR_IN1, GPIO.LOW)
GPIO.output(MOTOR_IN2, GPIO.LOW)
pwm.ChangeDutyCycle(0)
return 0
if level >= 4:
level = 4
GPIO.output(MOTOR_IN1, GPIO.HIGH)
GPIO.output(MOTOR_IN2, GPIO.LOW)
pwm.ChangeDutyCycle(level * 25) # 25%–100%
return level
def changeLevel(channel):
global level, currentTemp, markTemp
print("Button pressed")
level = (level + 1) % 5
markTemp = currentTemp
# Ereigniserkennung für Taster
GPIO.add_event_detect(BTN_PIN, GPIO.FALLING, callback=changeLevel, bouncetime=300)
def main():
global level, currentTemp, markTemp
markTemp = temperature()
while True:
currentTemp = temperature()
if level != 0:
if currentTemp - markTemp <= -2:
level -= 1
markTemp = currentTemp
elif currentTemp - markTemp >= 2:
if level < 4:
level += 1
markTemp = currentTemp
level = motor_run(level)
time.sleep(0.2)
try:
main()
except KeyboardInterrupt:
pass
finally:
pwm.stop()
GPIO.cleanup()
spi.close()
Code-Erklärung
Benötigte Module importieren:
RPi.GPIOfür die Steuerung von GPIO (Taster und Motor),spidevfür die Kommunikation mit MCP3008,timefür Verzögerungen,mathfür Temperaturberechnungen.
import RPi.GPIO as GPIO import spidev import time import math
GPIO-Pins einrichten:
Taster auf GPIO22 (interner Pull-Up),
Motorsteuerung über GPIO5 (vorwärts), GPIO6 (rückwärts) und GPIO13 (PWM).
BTN_PIN = 22 MOTOR_IN1 = 5 MOTOR_IN2 = 6 MOTOR_EN = 13 GPIO.setmode(GPIO.BCM) GPIO.setup(BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(MOTOR_IN1, GPIO.OUT) GPIO.setup(MOTOR_IN2, GPIO.OUT) GPIO.setup(MOTOR_EN, GPIO.OUT) pwm = GPIO.PWM(MOTOR_EN, 1000) pwm.start(0)
SPI-Kommunikation mit dem MCP3008 initialisieren (Bus 0, CE0) bei 1 MHz.
spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000
Funktion
read_adc()definiert, um einen 10-Bit-Analogwert (0–1023) vom angegebenen MCP3008-Kanal zu lesen.def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
Funktion
temperature():Analogspannung in Widerstand umrechnen,
Steinhart–Hart-Gleichung anwenden, um die Temperatur in °C zu berechnen.
def temperature(): analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 Rt = 10000.0 * Vr / (3.3 - Vr) tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0))) Cel = tempK - 273.15 return Cel
Funktion
motor_run():Motor bei Stufe 0 stoppen,
Motor vorwärts laufen lassen bei Stufe 1–4 mit PWM 25 % bis 100 %.
def motor_run(level): if level == 0: GPIO.output(MOTOR_IN1, GPIO.LOW) GPIO.output(MOTOR_IN2, GPIO.LOW) pwm.ChangeDutyCycle(0) return 0 if level >= 4: level = 4 GPIO.output(MOTOR_IN1, GPIO.HIGH) GPIO.output(MOTOR_IN2, GPIO.LOW) pwm.ChangeDutyCycle(level * 25) return level
changeLevel()-Callback bei Tastendruck:Motorstufe zyklisch erhöhen (0 bis 4),
aktuelle Temperatur als Referenz speichern.
def changeLevel(channel): global level, currentTemp, markTemp print("Button pressed") level = (level + 1) % 5 markTemp = currentTemp GPIO.add_event_detect(BTN_PIN, GPIO.FALLING, callback=changeLevel, bouncetime=300)
main()-Schleife:Temperaturänderung überwachen,
Bei -2 °C Stufe senken, bei +2 °C Stufe erhöhen,
Motorgeschwindigkeit entsprechend anpassen.
def main(): global level, currentTemp, markTemp markTemp = temperature() while True: currentTemp = temperature() if level != 0: if currentTemp - markTemp <= -2: level -= 1 markTemp = currentTemp elif currentTemp - markTemp >= 2: if level < 4: level += 1 markTemp = currentTemp level = motor_run(level) time.sleep(0.2)
Hauptfunktion starten und bei Strg+C aufräumen (Motor stoppen, GPIO und SPI freigeben).
try: main() except KeyboardInterrupt: pass finally: pwm.stop() GPIO.cleanup() spi.close()