Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
3.6 Pumpensteuerung
Kleine Kreiselpumpen eignen sich hervorragend für Projekte zur automatischen Pflanzenbewässerung. Sie können auch zum Erstellen kleiner intelligenter Wasserspiele verwendet werden.
Das Antriebselement ist ein Elektromotor, der genau wie ein herkömmlicher Motor betrieben wird.
Bemerkung
Schließen Sie den Schlauch an den Motorausgang an, tauchen Sie die Pumpe ins Wasser und schalten Sie sie ein.
Achten Sie darauf, dass der Wasserstand stets über dem Motor liegt. Ein Leerlauf kann den Motor durch Hitzegenerierung beschädigen und Lärm erzeugen.
Wenn Sie Pflanzen bewässern, sollten Sie das Einsaugen von Erde vermeiden, da dies die Pumpe verstopfen kann.
Sollte kein Wasser aus dem Schlauch kommen, könnte Restwasser im Schlauch die Luftzirkulation blockieren und muss zuerst abgelassen werden.
Benötigte Bauteile
Für dieses Projekt werden die folgenden Bauteile benötigt.
Es ist definitiv praktisch, ein komplettes Set zu kaufen, hier ist der Link:
Bezeichnung |
BAUTEILE IN DIESEM KIT |
LINK |
|---|---|---|
Kepler Kit |
450+ |
Sie können die Bauteile auch einzeln über die untenstehenden Links erwerben.
SN |
BAUTEIL |
MENGE |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 |
||
6 |
1 |
||
7 |
Power Pack |
1 |
|
8 |
Batteriehalter |
1 |
|
9 |
1 |
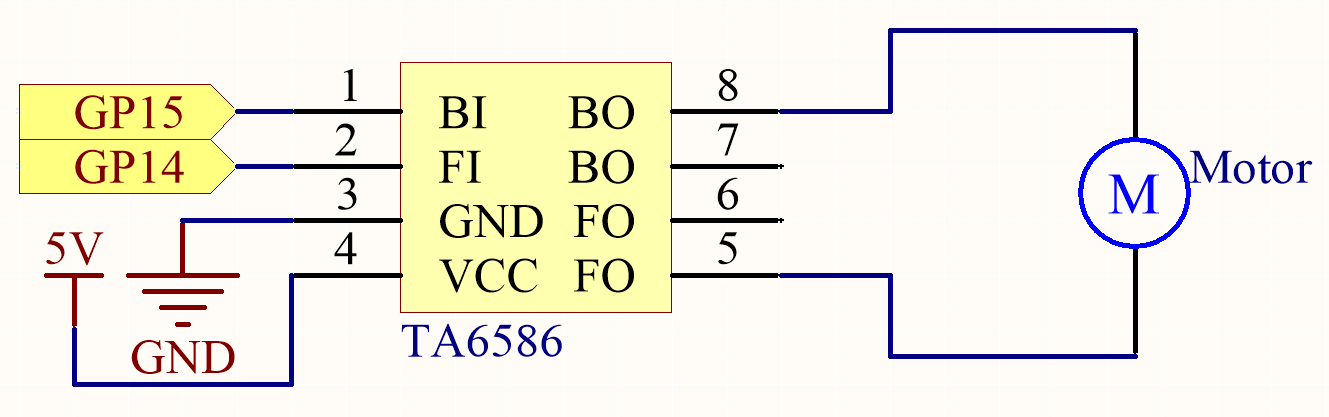
Schaltplan
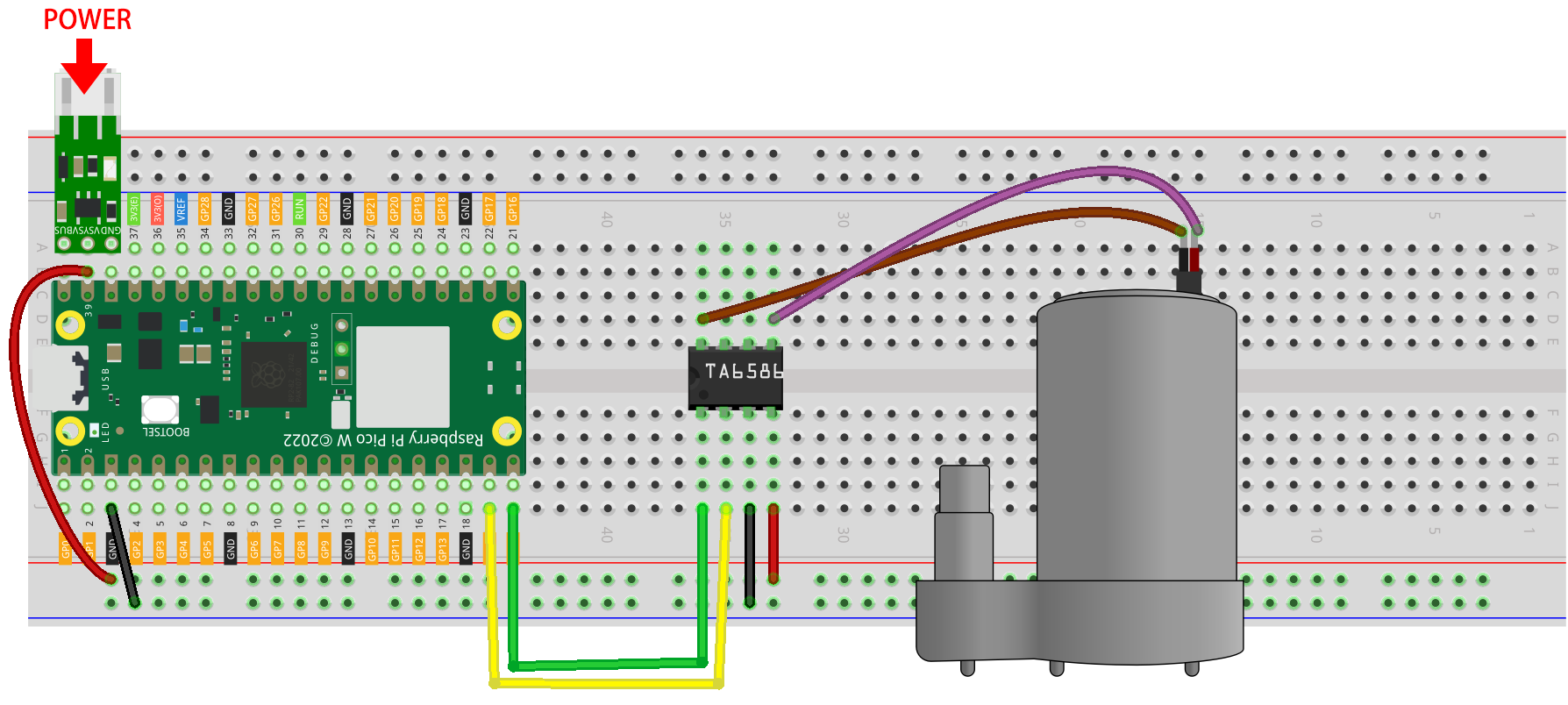
Verkabelung
Bemerkung
Da die Pumpe einen hohen Strombedarf hat, nutzen wir ein Li-Po-Ladegerät-Modul, um den Motor aus Sicherheitsgründen mit Strom zu versorgen.
Stellen Sie sicher, dass Ihr Li-Po-Ladegerät-Modul wie im Diagramm gezeigt angeschlossen ist. Andernfalls könnte es zu einem Kurzschluss kommen, der Ihre Batterie und Schaltung beschädigt.
Code
Bemerkung
Öffnen Sie die Datei
3.6_pumping.pyim Pfadkepler-kit-main/micropythonoder kopieren Sie diesen Code in Thonny, dann klicken Sie auf „Aktuelles Skript ausführen“ oder drücken einfach F5.Vergessen Sie nicht, unten rechts auf den „MicroPython (Raspberry Pi Pico)“-Interpreter zu klicken.
Für detaillierte Anleitungen verweisen wir auf Code direkt öffnen und ausführen.
import machine
import utime
motor1A = machine.Pin(14, machine.Pin.OUT)
motor2A = machine.Pin(15, machine.Pin.OUT)
while True:
motor1A.high()
motor2A.low()
Nachdem der Code ausgeführt wurde, beginnt die Pumpe zu arbeiten und gleichzeitig fließt Wasser aus dem Schlauch.
Bemerkung
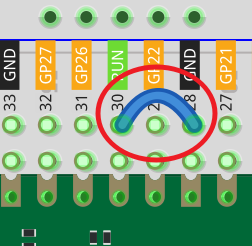
Sollte der Motor nach dem Klicken auf den Stop-Button immer noch laufen, müssen Sie zu diesem Zeitpunkt den RUN-Pin am Pico W mit einem Draht auf GND zurücksetzen und dann diesen Draht entfernen, um den Code erneut auszuführen.
Dies liegt daran, dass der Motor mit zu hohem Strom arbeitet, was dazu führen kann, dass der Pico W die Verbindung zum Computer verliert.