Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
7.12 Digitaler Wasserwaage
Ein Wasserwaage ist ein Instrument, das dazu dient, zu zeigen, ob eine Fläche horizontal (waagerecht) oder vertikal (senkrecht) ist. Verschiedene Typen von Wasserwaagen werden von Zimmerleuten, Steinmetzen, Maurern und anderen Handwerkern im Baugewerbe, von Vermessungsingenieuren, Mühlenbauern und anderen Metallarbeitern sowie in einigen fotografischen und videografischen Arbeiten verwendet.
In diesem Projekt erstellen wir eine digitale Wasserwaage mit einem MPU6050 und einer 8x8 LED-Matrix. Wenn Sie den MPU6050 kippen, wird die Blase auf der LED-Matrix ebenfalls kippen.
Erforderliche Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein gesamtes Kit zu kaufen. Hier ist der Link:
Bezeichnung |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
Kepler-Set |
450+ |
Die Komponenten können auch einzeln über die untenstehenden Links erworben werden.
SN |
KOMPONENTE |
ANZAHL |
LINK |
|---|---|---|---|
1 |
1 |
||
2 |
Micro-USB-Kabel |
1 |
|
3 |
1 |
||
4 |
Mehrere |
||
5 |
1 |
||
6 |
2 |
||
7 |
1 |
Schaltplan
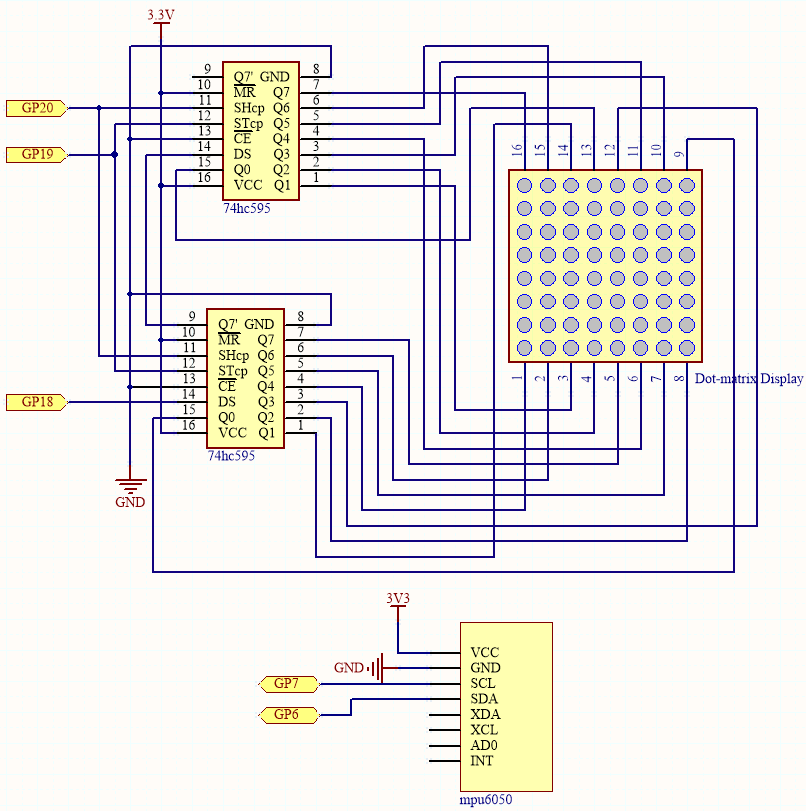
Der MPU6050 nimmt die Beschleunigungswerte in jeder Richtung auf und berechnet den Neigungswinkel.
Das Programm erzeugt dann auf Basis der Daten von den beiden 74HC595-Chips einen 2x2-Punkt auf der Punktmatrix.
Je nach Veränderung des Neigungswinkels sendet das Programm unterschiedliche Daten an die 74HC595-Chips, und die Position des Punkts ändert sich, was einen Blaseneffekt erzeugt.
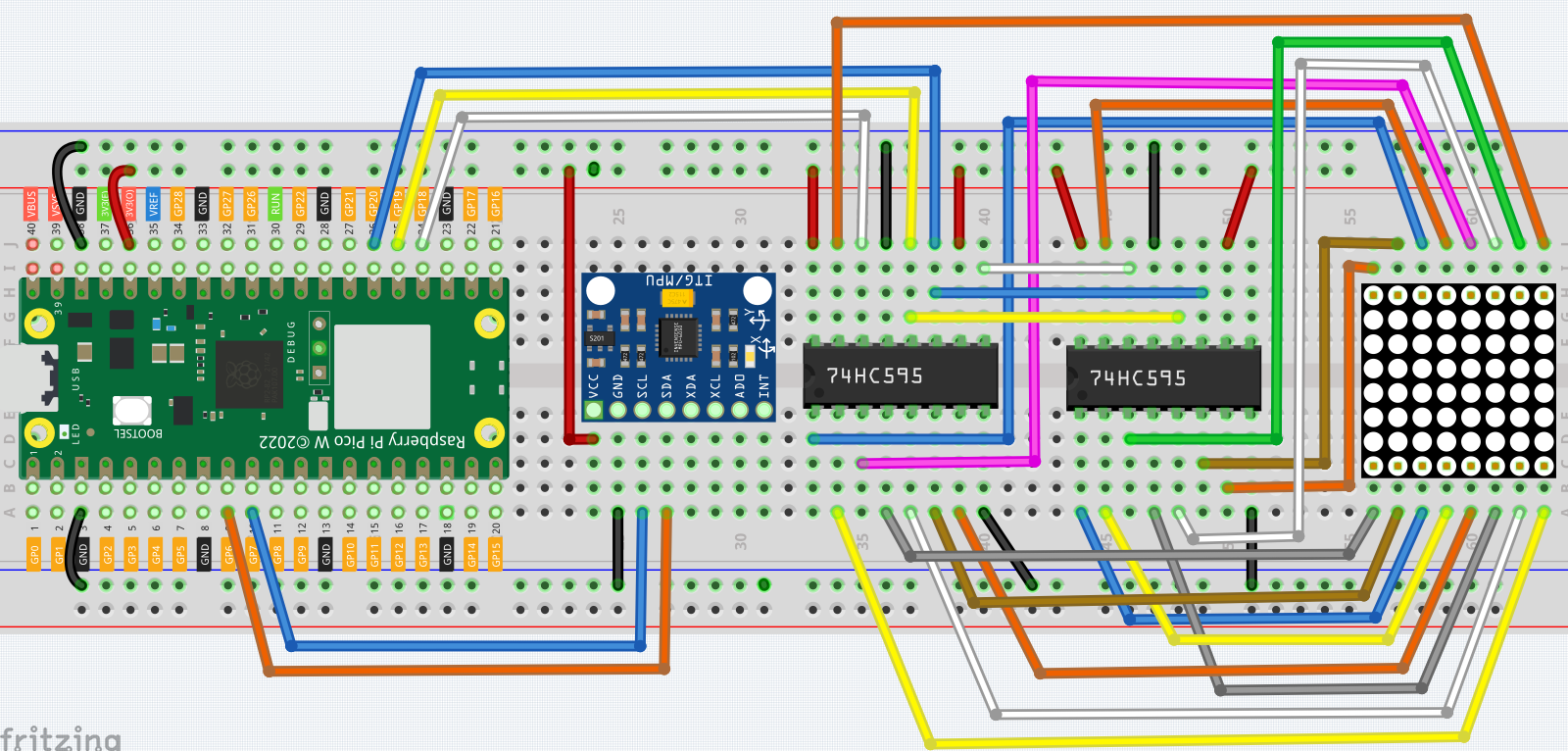
Verkabelung
Code
Bemerkung
Öffnen Sie die Datei
7.12_digital_bubble_level.pyim Verzeichniskepler-kit-main/micropythonoder kopieren Sie diesen Code in Thonny und klicken Sie dann auf „Aktuelles Skript ausführen“ oder drücken Sie einfach F5.Vergewissern Sie sich, dass der Interpreter „MicroPython (Raspberry Pi Pico)“ in der unteren rechten Ecke ausgewählt ist.
Für detaillierte Anleitungen siehe Code direkt öffnen und ausführen.
Hier müssen Sie auch die Dateien
imu.pyundvector3d.pyverwenden. Bitte überprüfen Sie, ob sie auf dem Pico W hochgeladen wurden. Detaillierte Anweisungen finden Sie unter 1.4 Bibliotheken auf den Pico hochladen.
import machine
from machine import I2C, Pin
import time
import math
from imu import MPU6050
# Initialize I2C communication with MPU6050 sensor
i2c = I2C(1, sda=Pin(6), scl=Pin(7), freq=400000)
mpu = MPU6050(i2c)
# Function to calculate the distance between two points
def dist(a, b):
return math.sqrt((a * a) + (b * b))
# Function to calculate rotation along the y-axis
def get_y_rotation(x, y, z):
radians = math.atan2(x, dist(y, z))
return -math.degrees(radians)
# Function to calculate rotation along the x-axis
def get_x_rotation(x, y, z):
radians = math.atan2(y, dist(x, z))
return math.degrees(radians)
# Function to get the current angles from the MPU6050 sensor
def get_angle():
y_angle = get_y_rotation(mpu.accel.x, mpu.accel.y, mpu.accel.z)
x_angle = get_x_rotation(mpu.accel.x, mpu.accel.y, mpu.accel.z)
return x_angle, y_angle
# Initialize shift register pins for controlling the LED matrix
sdi = machine.Pin(18, machine.Pin.OUT)
rclk = machine.Pin(19, machine.Pin.OUT)
srclk = machine.Pin(20, machine.Pin.OUT)
# Function to shift data into the shift register
def hc595_in(dat):
for bit in range(7, -1, -1):
srclk.low()
time.sleep_us(30)
sdi.value(1 & (dat >> bit))
time.sleep_us(30)
srclk.high()
# Function to output the data from the shift register to the LED matrix
def hc595_out():
rclk.high()
time.sleep_us(200)
rclk.low()
# Function to display a glyph (8x8 matrix) on the LED matrix
def display(glyph):
for i in range(0, 8):
hc595_in(glyph[i])
hc595_in(0x80 >> i)
hc595_out()
# Convert a 2D matrix to a glyph that can be displayed on the LED matrix
def matrix_2_glyph(matrix):
glyph = [0 for i in range(8)]
for i in range(8):
for j in range(8):
glyph[i] += matrix[i][j] << j
return glyph
# Clamp a value between a specified minimum and maximum
def clamp_number(val, min_val, max_val):
return min_val if val < min_val else max_val if val > max_val else val
# Map a value from one range to another
def interval_mapping(x, in_min, in_max, out_min, out_max):
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min
# Calculate the position of the bubble in the matrix based on the MPU6050 readings
sensitivity = 4 # Sensitivity of the bubble movement
matrix_range = 7 # The matrix size is 8x8, so the range is 0-7
point_range = matrix_range - 1 # Bubble's position should be between 0 and 6
# Function to calculate the position of the bubble based on sensor data
def bubble_position():
y, x = get_angle() # Get the current rotation angles
x = int(clamp_number(interval_mapping(x, 90, -90, 0 - sensitivity, point_range + sensitivity), 0, point_range))
y = int(clamp_number(interval_mapping(y, -90, 90, point_range + sensitivity, 0 - sensitivity), 0, point_range))
return [x, y]
# Drop the bubble (represented by turning off 2x2 LEDs) into the matrix
def drop_bubble(matrix, bubble):
matrix[bubble[0]][bubble[1]] = 0
matrix[bubble[0] + 1][bubble[1]] = 0
matrix[bubble[0]][bubble[1] + 1] = 0
matrix[bubble[0] + 1][bubble[1] + 1] = 0
return matrix
# Main loop
while True:
matrix = [[1 for i in range(8)] for j in range(8)] # Create an empty matrix (all LEDs on)
bubble = bubble_position() # Get the current bubble position based on sensor data
matrix = drop_bubble(matrix, bubble) # Drop the bubble into the matrix
display(matrix_2_glyph(matrix)) # Display the matrix on the LED grid
time.sleep(0.1) # Add a small delay to slow down updates
Stellen Sie das Steckbrett auf eine ebene Fläche, nachdem Sie das Programm ausgeführt haben. Ein Punkt wird in der Mitte der LED-Matrix erscheinen (falls dies nicht der Fall ist, ist der MPU6050 möglicherweise nicht waagerecht). Wenn Sie das Steckbrett kippen, wird der Punkt in die Richtung wandern, in die Sie es gekippt haben.