Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [ hier ] und treten Sie heute bei!
Wasserpumpe
Überblick
Die Wasserpumpe ist auch ein Motor, der die mechanische Energie des Motors oder anderer externer Energie durch eine spezielle Struktur umwandelt, um die Flüssigkeit zu transportieren.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein ganzes Set zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
Elite Explorer Kit |
300+ |
Sie können sie auch einzeln über die untenstehenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUF-LINK |
|---|---|
- |
|
- |
|
- |
Verdrahtung

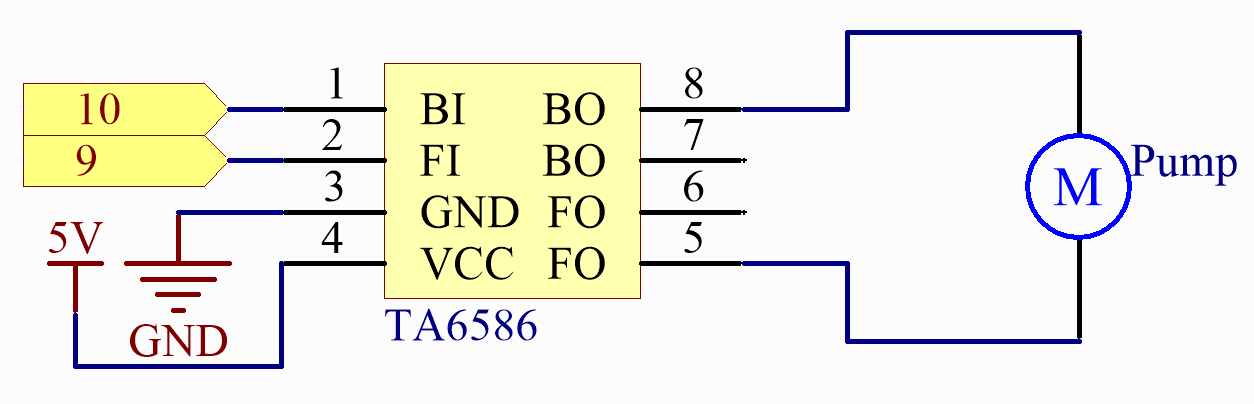
Schaltplan
Code
Bemerkung
Sie können die Datei
25-pump.inodirekt im Pfadelite-explorer-kit-main\basic_project\25-pumpöffnen.Oder kopieren Sie diesen Code in die Arduino IDE.
1/*
2 This code controls a water pump using a TA6586 chip with an Arduino Uno R4.
3 It turns on the pump for 5 seconds and then turns it off.
4
5 Board: Arduino Uno R4
6 Component: Water pump and TA6586 chip
7*/
8
9// Define the control pins for the TA6586 chip
10const int motorBI = 9; // Backward Input pin
11const int motorFI = 10; // Forward Input pin
12
13void setup() {
14 // Configure the motor control pins as output
15 pinMode(motorBI, OUTPUT);
16 pinMode(motorFI, OUTPUT);
17
18 // Turn on the water pump by setting the control pins
19 digitalWrite(motorBI, HIGH);
20 digitalWrite(motorFI, LOW);
21
22 // Keep the pump on for 5 seconds
23 delay(5000);
24
25 // Turn off the water pump
26 digitalWrite(motorFI, LOW);
27 digitalWrite(motorBI, LOW); // This line was missing in the original code to fully turn off the pump
28}
29
30void loop() {
31 // Empty loop, no operation is done here
32}
Befestigen Sie den Schlauch an der Pumpe und positionieren Sie sie im Becken. Sobald der Code erfolgreich hochgeladen wurde, schaltet sich die Wasserpumpe ein und bleibt fünf Sekunden lang aktiv. Bitte achten Sie bei diesem Experiment darauf, dass der Stromkreis vom Wasser ferngehalten wird, um mögliche Kurzschlüsse zu vermeiden.
Code-Analyse
Der Motor kann betrieben werden, indem man eine Spannungsdifferenz zwischen den Kupferplatten auf beiden Seiten des Motors herstellt.
digitalWrite(motorBI, HIGH);
digitalWrite(motorFI, LOW);