Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [ hier ] und treten Sie heute bei!
Ultraschall
Überblick
Wenn Sie rückwärts fahren, sehen Sie die Entfernung zwischen dem Auto und den umliegenden Hindernissen, um eine Kollision zu vermeiden. Das Gerät zur Entfernungserkennung ist ein Ultraschallsensor. In diesem Experiment lernen Sie, wie die Ultraschallwelle die Entfernung erkennt.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein komplettes Kit zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
Elite Explorer Kit |
300+ |
Sie können die Komponenten auch separat über die untenstehenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUF-LINK |
|---|---|
- |
|
Verdrahtung

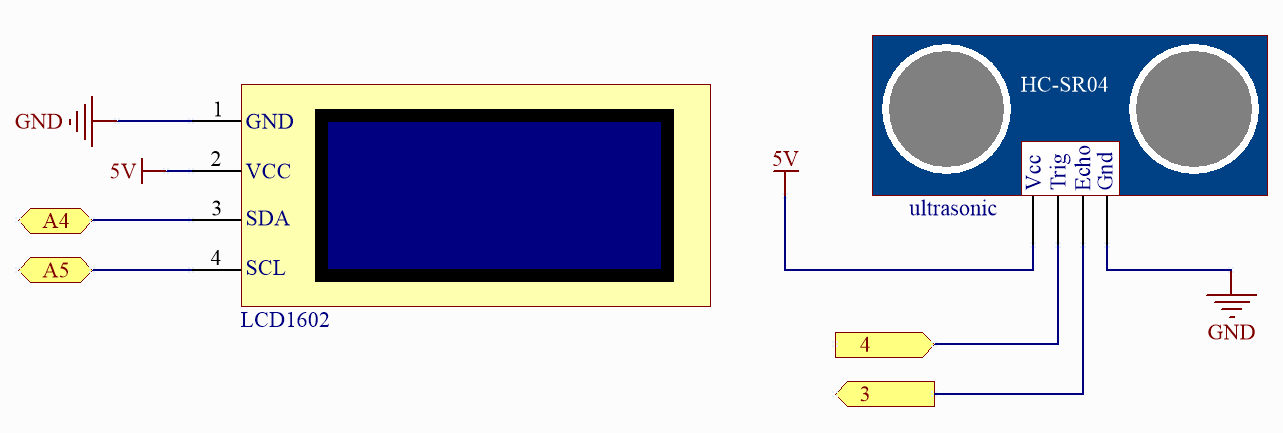
Schaltplan
Code
Bemerkung
Sie können die Datei
06-ultrasonic.inodirekt unter dem Pfadelite-explorer-kit-main\basic_project\06-ultrasonicöffnen.Oder kopieren Sie diesen Code in die Arduino IDE.
1/*
2 This code read the distance from an ultrasonic sensor and display it on
3 an LCD screen. It uses an Arduino Uno R4 board and a 16x2 Liquid Crystal
4 Display (LCD) connected via I2C. The ultrasonic sensor is connected to
5 pins 3 and 4 for echo and trigger, respectively.
6
7 Board: Arduino Uno R4
8 Component: Ultrasonic Module
9*/
10
11#include <LiquidCrystal_I2C.h>
12
13LiquidCrystal_I2C lcd(0x27, 16, 2); // initialize the Liquid Crystal Display object with the I2C address 0x27, 16 columns and 2 rows
14
15// Define the pin numbers for the ultrasonic sensor
16const int echoPin = 3;
17const int trigPin = 4;
18
19void setup() {
20 pinMode(echoPin, INPUT); // Set echo pin as input
21 pinMode(trigPin, OUTPUT); // Set trig pin as output
22
23 lcd.init(); // initialize the LCD
24 lcd.clear(); // clear the LCD display
25 lcd.backlight(); // Make sure backlight is on
26}
27
28void loop() {
29 float distance = readDistance(); // Call the function to read the sensor data and get the distance
30
31 lcd.setCursor(0, 0); //Place the cursor at Line 1, Column 1. From here the characters are to be displayed
32 lcd.print("Distance:"); ////Print Distance: on the LCD
33 lcd.setCursor(0, 1); //Set the cursor at Line 1, Column 0
34 lcd.print(" "); //Here is to leave some spaces after the characters so as to clear the previous characters that may still remain.
35 lcd.setCursor(7, 1); //Set the cursor at Line 1, Column 7.
36 lcd.print(distance); // print on the LCD the value of the distance converted from the time between ping sending and receiving.
37 lcd.setCursor(14, 1); //Set the cursor at Line 1, Column 14.
38 lcd.print("cm"); //print the unit "cm"
39
40 delay(800); // Delay for 800 milliseconds before repeating the loop
41}
42
43// Function to read the sensor data and calculate the distance
44float readDistance() {
45 digitalWrite(trigPin, LOW); // Set trig pin to low to ensure a clean pulse
46 delayMicroseconds(2); // Delay for 2 microseconds
47 digitalWrite(trigPin, HIGH); // Send a 10 microsecond pulse by setting trig pin to high
48 delayMicroseconds(10);
49 digitalWrite(trigPin, LOW); // Set trig pin back to low
50
51 // Measure the pulse width of the echo pin and calculate the distance value
52 float distance = pulseIn(echoPin, HIGH) / 58.00; // Formula: (340m/s * 1us) / 2
53 return distance;
54}
Code-Analyse
1. Initialisieren des Ultraschallsensors und des LCD1602
#include <LiquidCrystal_I2C.h> LiquidCrystal_I2C lcd(0x27, 16, 2); // initialize the Liquid Crystal Display object with the I2C address 0x27, 16 columns and 2 rows // Define the pin numbers for the ultrasonic sensor const int echoPin = 3; const int trigPin = 4; void setup() { pinMode(echoPin, INPUT); // Set echo pin as input pinMode(trigPin, OUTPUT); // Set trig pin as output lcd.init(); // initialize the LCD lcd.clear(); // clear the LCD display lcd.backlight(); // Make sure backlight is on }
2. Anzeige der Entfernung auf dem LCD1602
void loop() { float distance = readDistance(); // Call the function to read the sensor data and get the distance lcd.setCursor(0, 0); //Place the cursor at Line 1, Column 1. From here the characters are to be displayed lcd.print("Distance:"); ////Print Distance: on the LCD lcd.setCursor(0, 1); //Set the cursor at Line 1, Column 0 lcd.print(" "); //Here is to leave some spaces after the characters so as to clear the previous characters that may still remain. lcd.setCursor(7, 1); //Set the cursor at Line 1, Column 7. lcd.print(distance); // print on the LCD the value of the distance converted from the time between ping sending and receiving. lcd.setCursor(14, 1); //Set the cursor at Line 1, Column 14. lcd.print("cm"); //print the unit "cm" delay(800); // Delay for 800 milliseconds before repeating the loop }
3. Umrechnung der Zeit in Entfernung
float readDistance(){// ...}Hier bezieht sich „PING“ auf den Prozess, bei dem der Ultraschallsensor einen Ultraschallimpuls (oder „Ping“) aussendet und dann auf sein Echo wartet.
PING wird durch einen HIGH-Puls von 2 oder mehr Mikrosekunden ausgelöst. (Vorher einen kurzen LOW-Puls geben, um einen sauberen HIGH-Puls zu gewährleisten.)
digitalWrite(trigPin, LOW); delayMicroseconds(2); digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW);Der Echo-Pin wird verwendet, um das Signal von PING zu lesen, einen HIGH-Puls, dessen Dauer die Zeit (in Mikrosekunden) vom Senden des Pings bis zum Empfang des Echos des Objekts ist. Wir verwenden die folgende Funktion, um die Dauer zu erhalten.
pulseIn(echoPin, HIGH);Die Schallgeschwindigkeit beträgt 340 m/s oder 29 Mikrosekunden pro Zentimeter.
Dies gibt die vom Ping zurückgelegte Strecke, hin und zurück, an, daher teilen wir durch 2, um die Entfernung des Hindernisses zu erhalten.
float distance = pulseIn(echoPin, HIGH) / 29.00 / 2; // Formula: (340m/s * 1us) / 2