Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [ hier ] und treten Sie heute bei!
Schrittmotor
Überblick
In dieser Lektion lernen Sie, wie man Schrittmotoren steuert, speziell das Modell 28BYJ-48, unter Verwendung eines ULN2003-Treibers und eines Arduino Uno R4. Schrittmotoren werden in einer Vielzahl von Anwendungen wie 3D-Druckern, CNC-Maschinen, Robotik und sogar in gängigen Haushaltsgeräten verwendet. Ihre präzise Steuerung ermöglicht komplexe Bewegungen, was sie ideal für Projekte macht, die eine hohe Positionsgenauigkeit erfordern.
In diesem Projekt konfigurieren wir den 28BYJ-48-Schrittmotor so, dass er sich in beide Richtungen – im Uhrzeigersinn und gegen den Uhrzeigersinn – mit verschiedenen Geschwindigkeiten dreht. Solche Schrittmotoren werden oft in automatisierten Systemen verwendet, um Objekte zu drehen oder Mechanismen anzutreiben, die eine präzise Steuerung erfordern. Beispielsweise können sie in automatischen Vorhängen verwendet werden, die sich zu bestimmten Zeiten oder unter bestimmten Bedingungen öffnen oder schließen. Wenn Sie verstehen, wie man die Drehung und Geschwindigkeit eines Schrittmotors steuert, sind Sie auf dem besten Weg, sie in Ihre eigenen elektronischen Projekte zu integrieren.
Benötigte Komponenten
Für dieses Projekt benötigen wir die folgenden Komponenten.
Es ist definitiv praktisch, ein ganzes Set zu kaufen, hier ist der Link:
Name |
ARTIKEL IN DIESEM KIT |
LINK |
|---|---|---|
Elite Explorer Kit |
300+ |
Sie können sie auch einzeln über die untenstehenden Links kaufen.
KOMPONENTENBESCHREIBUNG |
KAUF-LINK |
|---|---|
- |
|
- |
Verdrahtung
Warnung
Aufgrund des hohen Stromverbrauchs des Schrittmotors ist es ratsam, eine externe 5V-Stromversorgung zu verwenden, anstatt sich auf den Arduino zu verlassen.
Obwohl es möglich ist, den Schrittmotor direkt vom Arduino zu betreiben, wird dies nicht empfohlen, da es elektrisches Rauschen auf dessen Stromversorgungsleitungen verursachen kann, was möglicherweise zu Schäden am Arduino führt.

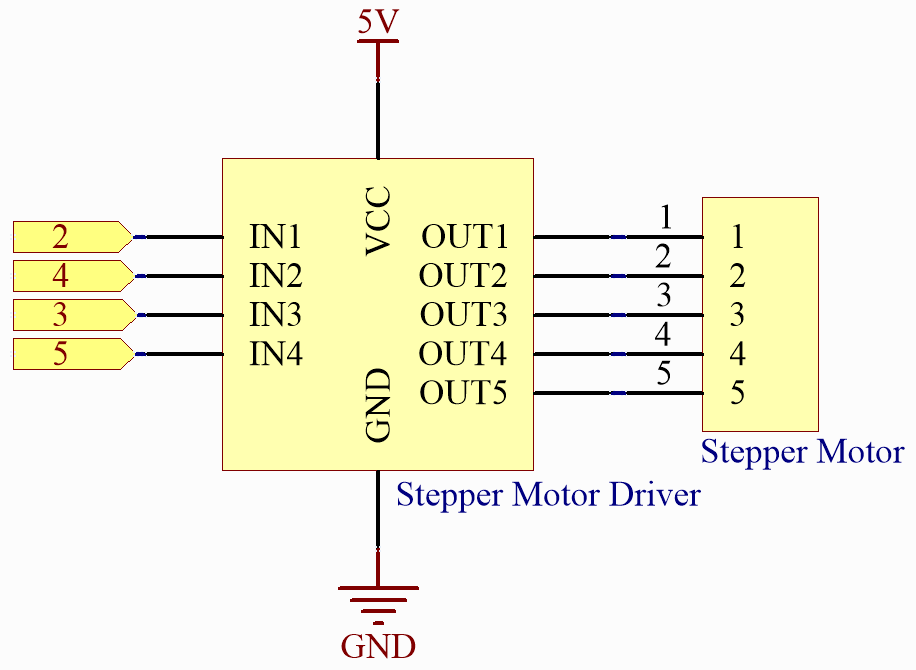
Schaltplan
Code
Bemerkung
Sie können die Datei
26-stepper_motor.inodirekt im Pfadelite-explorer-kit-main\basic_project\26-stepper_motor.rstöffnen.Oder kopieren Sie diesen Code in die Arduino IDE.
1/*
2 This code is intended to control a 28BYJ-48 stepper motor using a ULN2003 driver
3 and an Arduino Uno R4. The motor is rotated in both clockwise and counter-clockwise
4 directions at different speeds.
5
6 Board: Arduino Uno R4
7 Component: 28BYJ-48 Stepper Motor and ULN2003 Driver
8*/
9
10#include <Stepper.h> // Include the Stepper library
11
12#define STEPS 2038 // Define the number of steps per revolution for the motor
13Stepper stepper(STEPS, 2, 3, 4, 5); // Initialize stepper object and set pin connections (IN1, IN3, IN2, IN4)
14
15void setup() {
16}
17
18void loop() {
19 // Rotate clockwise at 5 RPM
20 stepper.setSpeed(5);
21 stepper.step(STEPS); // Rotate one full revolution clockwise
22 delay(1000); // Wait for 1 second
23
24 // Rotate counter-clockwise at 15 RPM
25 stepper.setSpeed(15);
26 stepper.step(-STEPS); // Rotate one full revolution counter-clockwise
27 delay(1000); // Wait for 1 second
28}
Nachdem der Code auf das Arduino Uno Board hochgeladen wurde, beginnt der 28BYJ-48 Schrittmotor sich zu drehen, angetrieben durch den ULN2003 Treiber. Zunächst dreht sich der Motor im Uhrzeigersinn mit einer Geschwindigkeit von 5 Umdrehungen pro Minute (RPM) für eine vollständige Umdrehung. Nachdem die Drehung im Uhrzeigersinn abgeschlossen ist, hält der Motor für 1 Sekunde an.
Anschließend dreht sich der Motor in die entgegengesetzte Richtung, gegen den Uhrzeigersinn, mit einer erhöhten Geschwindigkeit von 15 RPM für eine weitere vollständige Umdrehung. Wieder hält der Motor nach der Drehung gegen den Uhrzeigersinn für 1 Sekunde an. Der Zyklus aus Drehung und Pause setzt sich unendlich fort, solange das Arduino mit Strom versorgt wird.
Code-Analyse
Initialisierung des Schrittmotors
#include <Stepper.h> // Include the Stepper library #define STEPS 2038 // Define the number of steps per revolution for the motor Stepper stepper(STEPS, 2, 3, 4, 5); // Initialize stepper object and set pin connections (IN1, IN3, IN2, IN4)
Binden Sie die Kopfdatei
Stepper.hein, setzen Sie die Schritte auf 2038 und initialisieren Sie den Schrittmotor mit der Funktion stepper().STEPS: Die Anzahl der Schritte in einer Umdrehung Ihres Motors. Für diesen Schrittmotor beträgt dieser Wert 2038.Stepper(steps, pin1, pin2, pin3, pin4): Diese Funktion erstellt eine neue Instanz der Stepper-Klasse, die einen bestimmten Schrittmotor repräsentiert, der an Ihrem Arduino-Board angeschlossen ist. Die Pins pin1, pin2, pin3 und pin4 entsprechen den IN1-, IN3-, IN2- und IN4-Pins am ULN2003-Treiber.loop() Funktion
void loop() { // Rotate clockwise at 5 RPM stepper.setSpeed(5); stepper.step(STEPS); // Rotate one full revolution clockwise delay(1000); // Wait for 1 second // Rotate counter-clockwise at 15 RPM stepper.setSpeed(15); stepper.step(-STEPS); // Rotate one full revolution counter-clockwise delay(1000); // Wait for 1 second }
Das Hauptprogramm dreht den Schrittmotor kontinuierlich, einmal eine volle Drehung im Uhrzeigersinn mit 5 U/min und dann einmal eine volle Drehung gegen den Uhrzeigersinn mit 15 U/min.
setSpeed(rpms): Legt die Motorgeschwindigkeit in Umdrehungen pro Minute (U/min) fest. Diese Funktion bringt den Motor nicht zum Drehen, sondern legt nur die Geschwindigkeit fest, mit der er sich dreht, wenn Sie step() aufrufen.rpms: die Geschwindigkeit, mit der sich der Motor in Umdrehungen pro Minute drehen soll – eine positive Zahl (long)
step(steps): Diese Funktion dreht den Motor um eine bestimmte Anzahl von Schritten, wobei die in der letzten setSpeed()-Aufruf festgelegte Geschwindigkeit verwendet wird. Es ist wichtig zu beachten, dass diese Funktion blockierend arbeitet, das heißt, sie wartet, bis der Motor seine Bewegung abgeschlossen hat, bevor die Steuerung zur nächsten Zeile Ihres Skripts weitergeht.Wenn Sie beispielsweise die Geschwindigkeit auf 1 U/min einstellen und step(2038) bei einem Motor mit 2038 Schritten aufrufen, würde es eine volle Minute dauern, bis diese Funktion ausgeführt wird. Um eine präzisere Steuerung zu erreichen, wird empfohlen, eine höhere Geschwindigkeit beizubehalten und nur wenige Schritte bei jedem Aufruf von step() zu machen.
steps: die Anzahl der Schritte, um den Motor zu drehen – positiv für eine Richtung, negativ für die andere (int).