注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 愛好者コミュニティ (Facebook) へようこそ! Raspberry Pi、Arduino、ESP32 を仲間と共にさらに深く学びましょう。
参加する理由
専門サポート: 購入後の問題や技術的課題をコミュニティとチームで解決
学びと共有: ヒントやチュートリアルを交換し、スキルを向上
限定プレビュー: 新製品発表や先行情報に早期アクセス
特別割引: 新製品を特別価格で購入可能
イベントとプレゼント企画: プレゼントや季節ごとのキャンペーンに参加
👉 一緒に探求し、創造しましょう。今すぐ [ここ] をクリックして参加!
4.1.10 スマートファン (MCP3008)
注釈

キットのバージョンにより ADC0834 または MCP3008 が含まれています。自分のキットに対応するセクションに従ってください。
概要
このプロジェクトでは、モーター、ボタン、サーミスタを使用して、手動 + 自動制御が可能で風速を調整できるスマートファンを作成します。
必要な部品
このプロジェクトで必要な部品は以下の通りです。
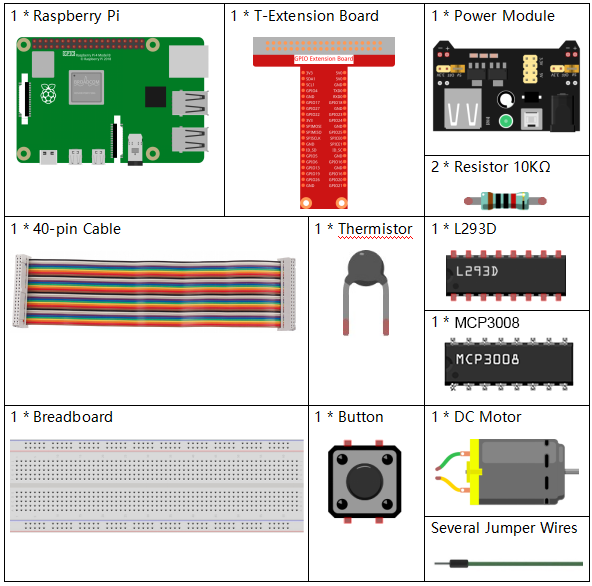
キット一式を購入するのが便利です。リンクはこちら:
名前 |
キット内の部品数 |
リンク |
|---|---|---|
Raphael Kit |
337 |
個別購入する場合は以下のリンクを参照してください。
部品名 |
購入リンク |
|---|---|
- |
|
- |
|
- |
|
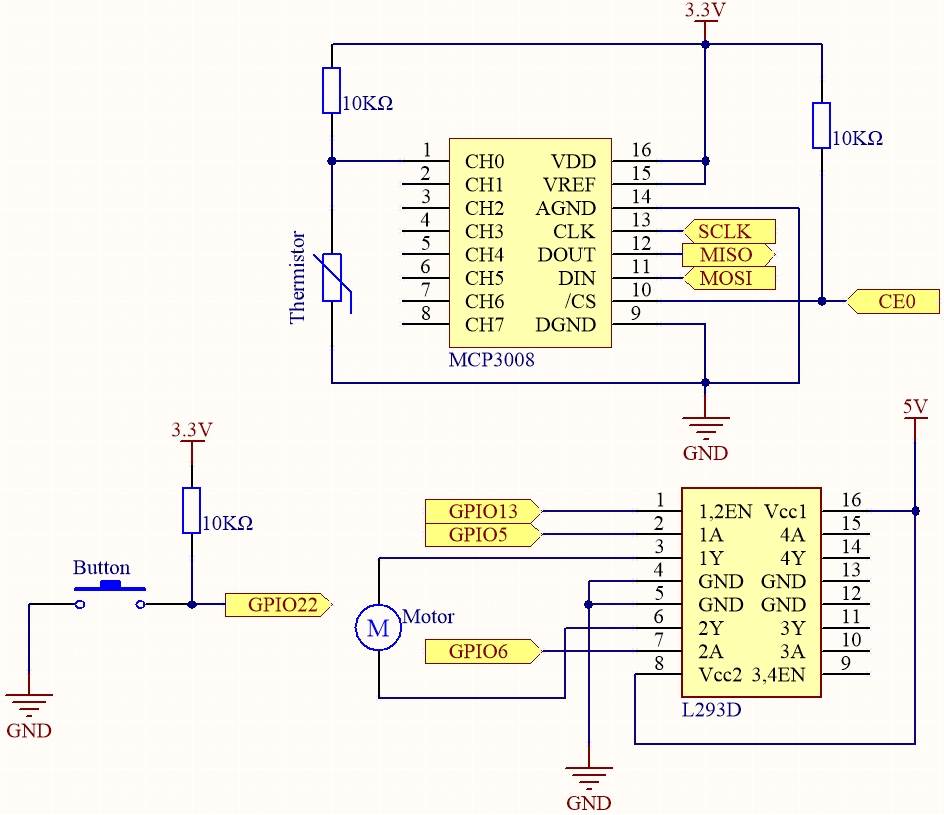
回路図
T-Board 名 |
physical |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
実験手順
ステップ 1: 回路を組み立てます。
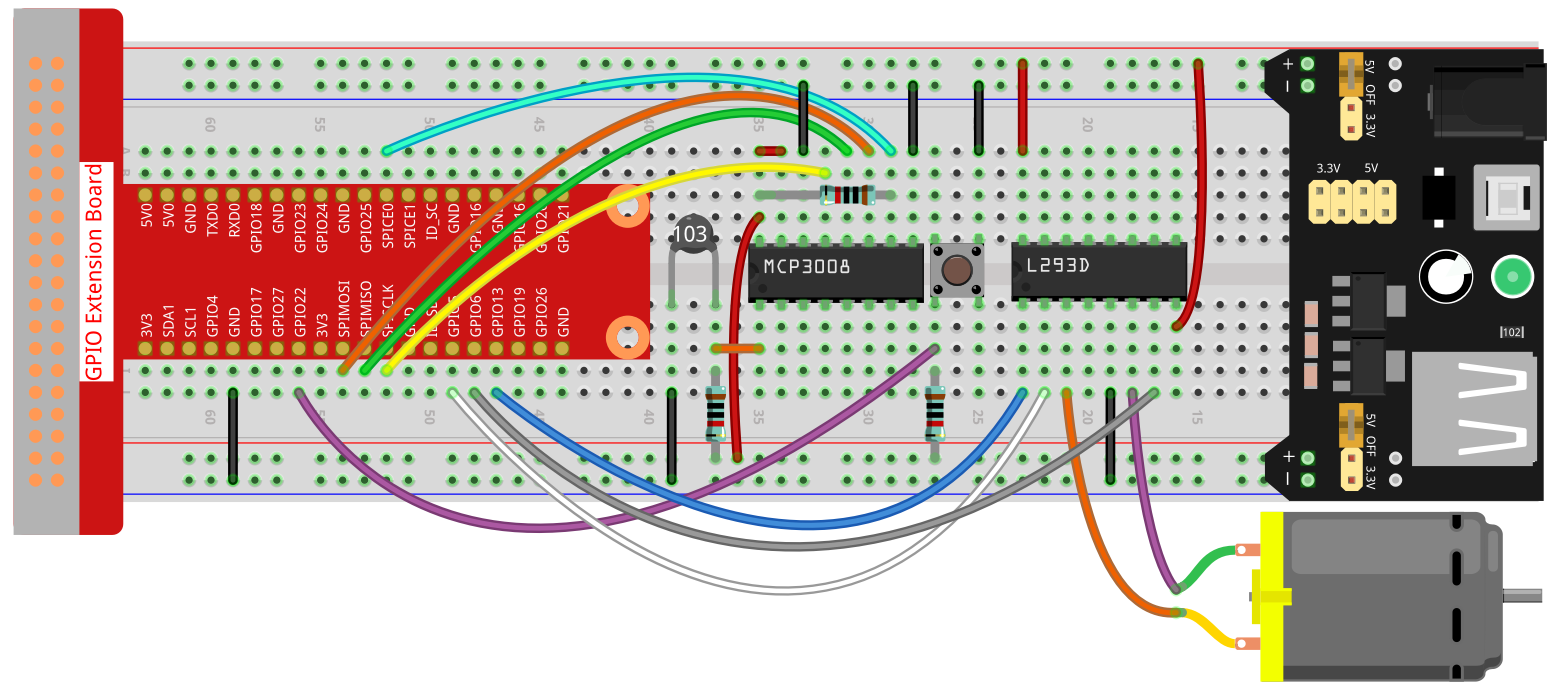
注釈
電源モジュールには付属の9V電池と9V電池スナップを使用できます。 電源モジュールのジャンパキャップをブレッドボードの5Vバスストリップに差し込みます。

ステップ 2: SPIインターフェースを設定し、 spidev ライブラリをインストールします(詳細は SPI 設定 を参照)。すでに設定済みの場合はこのステップを省略できます。
ステップ 3: コードのフォルダに移動します。
cd ~/raphael-kit/python
ステップ 4: 実行します。
sudo python3 4.1.10-2_SmartFan.py
コードを実行すると、ボタンを押すことでファンが始動します。押すたびに速度が1段階ずつ変化します。 速度段階は 0~4 の5段階です。4段階目でさらにボタンを押すと、ファンは停止(速度0)します。
温度が±2℃以上変化すると、速度は自動的に1段階上昇または下降します。
コード
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import spidev
import time
import math
# Pin configuration
BTN_PIN = 22 # Button GPIO (physical pin 15)
MOTOR_IN1 = 5 # Motor forward
MOTOR_IN2 = 6 # Motor backward
MOTOR_EN = 13 # PWM enable pin
# GPIO setup
GPIO.setmode(GPIO.BCM)
GPIO.setup(BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(MOTOR_IN1, GPIO.OUT)
GPIO.setup(MOTOR_IN2, GPIO.OUT)
GPIO.setup(MOTOR_EN, GPIO.OUT)
# PWM setup for motor speed control
pwm = GPIO.PWM(MOTOR_EN, 1000) # 1kHz frequency
pwm.start(0)
# Initialize SPI for MCP3008
spi = spidev.SpiDev()
spi.open(0, 0) # Bus 0, CE0
spi.max_speed_hz = 1000000 # 1 MHz
# Global variables
level = 0
currentTemp = 0
markTemp = 0
def read_adc(channel):
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def temperature():
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0
Rt = 10000.0 * Vr / (3.3 - Vr)
tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0)))
Cel = tempK - 273.15
return Cel
def motor_run(level):
if level == 0:
GPIO.output(MOTOR_IN1, GPIO.LOW)
GPIO.output(MOTOR_IN2, GPIO.LOW)
pwm.ChangeDutyCycle(0)
return 0
if level >= 4:
level = 4
GPIO.output(MOTOR_IN1, GPIO.HIGH)
GPIO.output(MOTOR_IN2, GPIO.LOW)
pwm.ChangeDutyCycle(level * 25) # Map level (1–4) to 25%–100%
return level
def changeLevel(channel):
global level, currentTemp, markTemp
print("Button pressed")
level = (level + 1) % 5
markTemp = currentTemp
# Add event detection for button press
GPIO.add_event_detect(BTN_PIN, GPIO.FALLING, callback=changeLevel, bouncetime=300)
def main():
global level, currentTemp, markTemp
markTemp = temperature()
while True:
currentTemp = temperature()
if level != 0:
if currentTemp - markTemp <= -2:
level -= 1
markTemp = currentTemp
elif currentTemp - markTemp >= 2:
if level < 4:
level += 1
markTemp = currentTemp
level = motor_run(level)
time.sleep(0.2)
try:
main()
except KeyboardInterrupt:
pass
finally:
pwm.stop()
GPIO.cleanup()
spi.close()
コード解説
必要なモジュールをインポート:
RPi.GPIO(ボタンとモーターのGPIO制御)spidev(MCP3008 ADCとの通信)time(待機処理)math(温度計算用の対数演算)
#!/usr/bin/env python3 import RPi.GPIO as GPIO import spidev import time import math
GPIOピン設定:
ボタン: GPIO22(内部プルアップ付き)
モーター制御: GPIO5(前進)、GPIO6(後退)、GPIO13(PWMイネーブル)
BTN_PIN = 22 MOTOR_IN1 = 5 MOTOR_IN2 = 6 MOTOR_EN = 13 GPIO.setmode(GPIO.BCM) GPIO.setup(BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(MOTOR_IN1, GPIO.OUT) GPIO.setup(MOTOR_IN2, GPIO.OUT) GPIO.setup(MOTOR_EN, GPIO.OUT) pwm = GPIO.PWM(MOTOR_EN, 1000) pwm.start(0)
SPI通信設定(MCP3008をバス0, CE0, 1MHzで接続)。
spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000
read_adc()関数: MCP3008の指定チャネル(0~7)から10ビット値(0~1023)を読み取る。def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
temperature()関数:アナログ電圧を抵抗値に変換
Steinhart–Hart式で摂氏温度に変換
def temperature(): analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 Rt = 10000.0 * Vr / (3.3 - Vr) tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0))) Cel = tempK - 273.15 return Cel
motor_run()関数:レベル0で停止
レベル1~4でPWM 25%~100%に対応させ速度調整
def motor_run(level): if level == 0: GPIO.output(MOTOR_IN1, GPIO.LOW) GPIO.output(MOTOR_IN2, GPIO.LOW) pwm.ChangeDutyCycle(0) return 0 if level >= 4: level = 4 GPIO.output(MOTOR_IN1, GPIO.HIGH) GPIO.output(MOTOR_IN2, GPIO.LOW) pwm.ChangeDutyCycle(level * 25) return level
changeLevel()コールバック:ボタンを押すたびに速度レベルを1段階変更(0~4をループ)
基準温度を現在温度に更新
def changeLevel(channel): global level, currentTemp, markTemp print("Button pressed") level = (level + 1) % 5 markTemp = currentTemp GPIO.add_event_detect(BTN_PIN, GPIO.FALLING, callback=changeLevel, bouncetime=300)
main()ループ:温度変化が±2℃を超えたら速度を自動調整
0.2秒ごとにモーター速度を更新
def main(): global level, currentTemp, markTemp markTemp = temperature() while True: currentTemp = temperature() if level != 0: if currentTemp - markTemp <= -2: level -= 1 markTemp = currentTemp elif currentTemp - markTemp >= 2: if level < 4: level += 1 markTemp = currentTemp level = motor_run(level) time.sleep(0.2)
Ctrl+Cで停止した場合のクリーンアップ:
モーター停止、GPIO解放、SPI終了
try: main() except KeyboardInterrupt: pass finally: pwm.stop() GPIO.cleanup() spi.close()