注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
4.1.9 逆転アラーム
はじめに
このプロジェクトでは、LCD、ブザー、超音波センサを使用して、逆方向の補助システムを作成します。これをリモートコントロール車に取り付けて、車をガレージに逆転させる実際のプロセスをシミュレートできます。
必要な部品
このプロジェクトには、以下の部品が必要です。
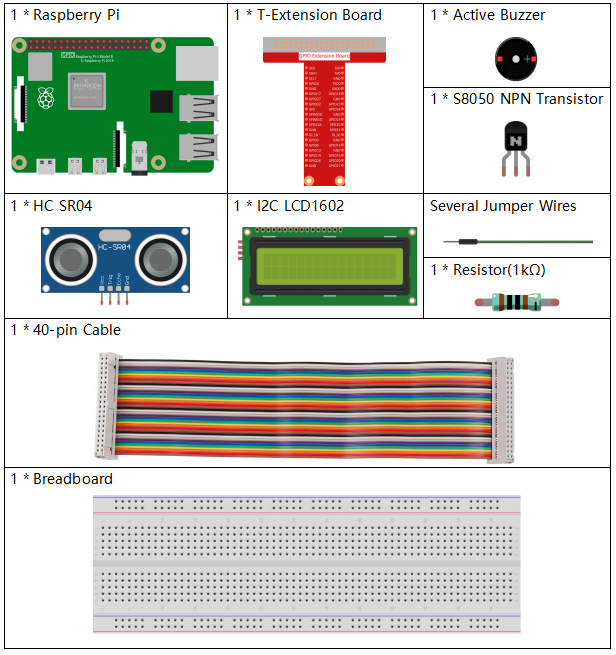
キット一式を購入すると便利です。リンクは以下の通りです:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
Raphael Kit |
337 |
以下のリンクから部品を個別に購入することもできます。
コンポーネントの紹介 |
購入リンク |
|---|---|
- |
|
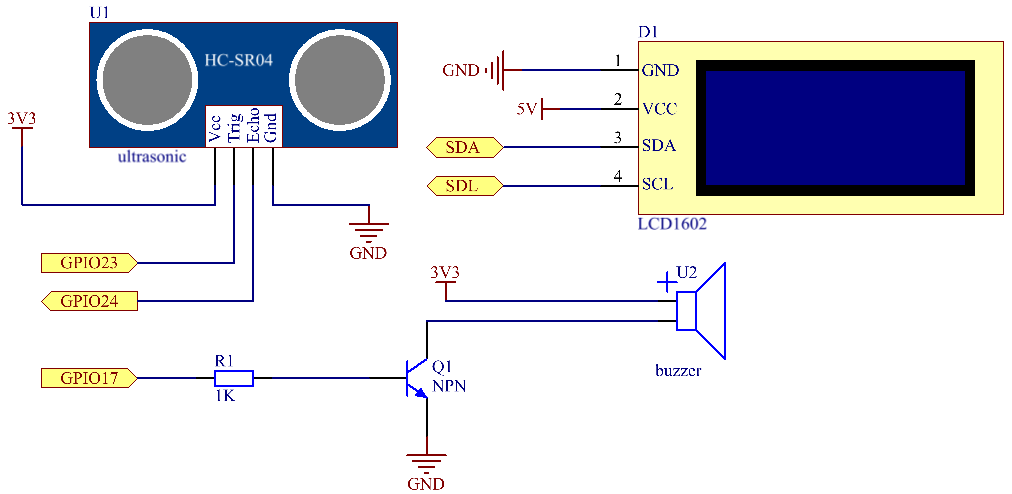
回路図
超音波センサは、自身と障害物との間の距離を検出し、その情報をコードの形でLCDに表示します。同時に、超音波センサは、異なる距離値に応じて、ブザーに異なる周波数のプロンプト音を発出させます。
T-Board Name |
physical |
wiringPi |
BCM |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
GPIO17 |
Pin 11 |
0 |
17 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
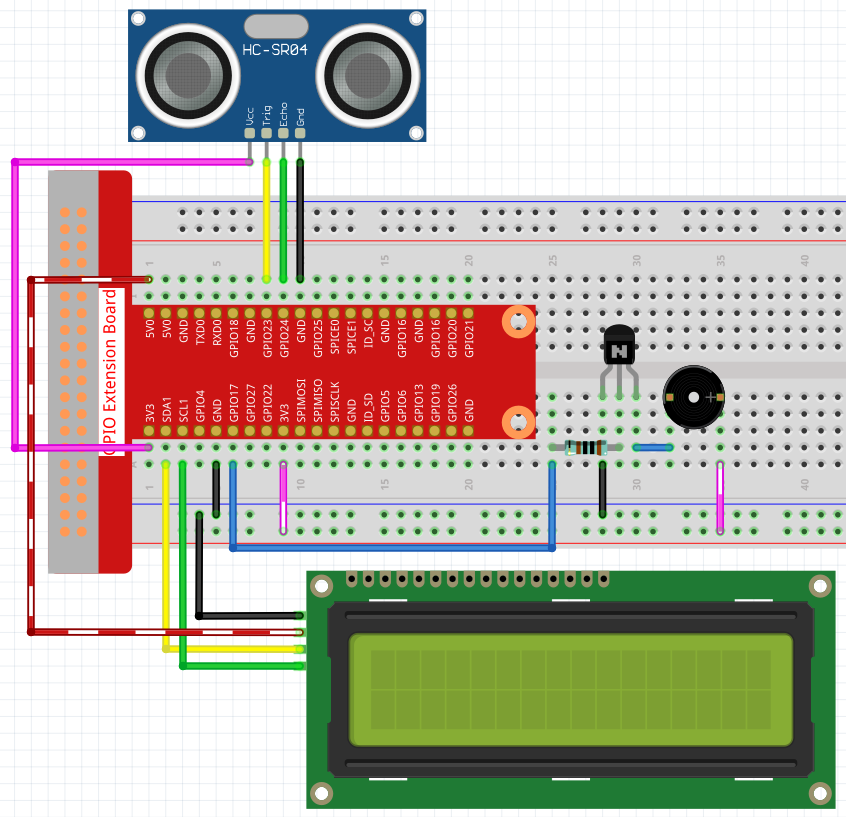
実験手順
ステップ1: 回路を組み立てる。
ステップ2: ディレクトリを変更する。
cd ~/raphael-kit/python/
ステップ3: 実行する。
sudo python3 4.1.9_ReversingAlarm.py
コードが実行されると、超音波センサモジュールは障害物までの距離を検出し、LCD1602に距離情報を表示します。さらに、ブザーは、距離に応じて周波数が変わる警告音を発します。
注釈
エラー
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1'が表示された場合、I2Cを有効にするために I²C 設定 を参照してください。エラー
ModuleNotFoundError: No module named 'smbus2'が表示された場合、sudo apt install python3-smbus2を実行してください。エラー
OSError: [Errno 121] Remote I/O errorが表示される場合、モジュールが誤って配線されているか、モジュールが壊れています。コードと配線が正しいのに、LCDが内容を表示しない場合は、裏面のポテンショメータを回してコントラストを上げることができます。
コード
注釈
以下のコードは 修正/リセット/コピー/実行/停止 が可能です。ただし、それを行う前に、 raphael-kit/python のようなソースコードのパスへ移動する必要があります。コードを修正した後、その効果を直接確認するために実行することができます。
import LCD1602
import time
import RPi.GPIO as GPIO
TRIG = 16
ECHO = 18
BUZZER = 11
def lcdsetup():
LCD1602.init(0x27, 1) # init(slave address, background light)
LCD1602.clear()
LCD1602.write(0, 0, 'Ultrasonic Starting')
LCD1602.write(1, 1, 'By SunFounder')
time.sleep(2)
def setup():
GPIO.setmode(GPIO.BOARD)
GPIO.setup(TRIG, GPIO.OUT)
GPIO.setup(ECHO, GPIO.IN)
GPIO.setup(BUZZER, GPIO.OUT, initial=GPIO.LOW)
lcdsetup()
def distance():
GPIO.output(TRIG, 0)
time.sleep(0.000002)
GPIO.output(TRIG, 1)
time.sleep(0.00001)
GPIO.output(TRIG, 0)
while GPIO.input(ECHO) == 0:
a = 0
time1 = time.time()
while GPIO.input(ECHO) == 1:
a = 1
time2 = time.time()
during = time2 - time1
return during * 340 / 2 * 100
def destroy():
GPIO.output(BUZZER, GPIO.LOW)
GPIO.cleanup()
LCD1602.clear()
def loop():
while True:
dis = distance()
print (dis, 'cm')
print ('')
GPIO.output(BUZZER, GPIO.LOW)
if (dis > 400):
LCD1602.clear()
LCD1602.write(0, 0, 'Error')
LCD1602.write(3, 1, 'Out of range')
time.sleep(0.5)
else:
LCD1602.clear()
LCD1602.write(0, 0, 'Distance is')
LCD1602.write(5, 1, str(round(dis,2)) +' cm')
if(dis>=50):
time.sleep(0.5)
elif(dis<50 and dis>20):
for i in range(0,2,1):
GPIO.output(BUZZER, GPIO.HIGH)
time.sleep(0.05)
GPIO.output(BUZZER, GPIO.LOW)
time.sleep(0.2)
elif(dis<=20):
for i in range(0,5,1):
GPIO.output(BUZZER, GPIO.HIGH)
time.sleep(0.05)
GPIO.output(BUZZER, GPIO.LOW)
time.sleep(0.05)
if __name__ == "__main__":
setup()
try:
loop()
except KeyboardInterrupt:
destroy()
コード説明
def lcdsetup():
LCD1602.init(0x27, 1) # init(slave address, background light)
def setup():
GPIO.setmode(GPIO.BOARD)
GPIO.setup(TRIG, GPIO.OUT)
GPIO.setup(ECHO, GPIO.IN)
GPIO.setup(BUZZER, GPIO.OUT, initial=GPIO.LOW)
lcdsetup()
このプログラムでは、前回使用したコンポーネントを総合的に利用しています。 ここでは、ブザー、LCD、超音波を使用しています。これらを前回と同じ方法で初期化することができます。
dis = distance()
print (dis, 'cm')
print ('')
GPIO.output(BUZZER, GPIO.LOW)
if (dis > 400):
LCD1602.clear()
LCD1602.write(0, 0, 'Error')
LCD1602.write(3, 1, 'Out of range')
time.sleep(0.5)
else:
LCD1602.clear()
LCD1602.write(0, 0, 'Distance is')
LCD1602.write(5, 1, str(round(dis,2)) +' cm')
ここで超音波センサの値を取得し、計算を通じて距離を求めます。距離の値が検出される値の範囲よりも大きい場合、LCDにエラーメッセージが表示されます。距離が動作範囲内である場合、対応する結果が出力されます。
LCD1602.write(5, 1, str(round(dis,2)) +' cm')
LCDの出力は文字型のみをサポートしているため、数値を文字に変換するために str() を使用する必要があります。これを小数点第2位まで丸めます。
if(dis>=50):
time.sleep(0.5)
elif(dis<50 and dis>20):
for i in range(0,2,1):
GPIO.output(BUZZER, GPIO.HIGH)
time.sleep(0.05)
GPIO.output(BUZZER, GPIO.LOW)
time.sleep(0.2)
elif(dis<=20):
for i in range(0,5,1):
GPIO.output(BUZZER, GPIO.HIGH)
time.sleep(0.05)
GPIO.output(BUZZER, GPIO.LOW)
time.sleep(0.05)
この判断条件は、ブザーの音を制御するために使用されます。 距離の違いに応じて、3つのケースに分けることができ、それぞれで異なる音の周波数が出力されます。遅延の合計値は500なので、これにより超音波センサが動作するための500msの間隔を提供することができます。
現象の画像
