注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Communityへようこそ!Raspberry Pi、Arduino、ESP32をさらに深く学び、仲間と共に楽しんでください。
なぜ参加するのか?
専門家によるサポート:販売後の問題や技術的な課題をコミュニティやチームのサポートで解決できます。
学びと共有:スキル向上のためのヒントやチュートリアルを交換しましょう。
限定プレビュー:新製品の発表や先行情報をいち早く手に入れましょう。
特別割引:最新の製品に対する限定割引をお楽しみいただけます。
お祭りプロモーションやプレゼントキャンペーン:プレゼントやキャンペーンに参加できます。
👉 一緒に探索し、創造していきませんか? [こちら] をクリックして今すぐ参加しましょう!
2.6 傾きセンサー
このレッスンでは、Raspberry Pi Pico 2を使用して、 傾きスイッチ を使い、向きの変化を検出する方法を学びます。傾きスイッチは、垂直か傾いているかを感知する単純なデバイスで、動き検出、向きの感知、位置に基づくトリガーとして役立ちます。
必要なもの
このプロジェクトには、以下のコンポーネントが必要です。
一式で購入するのが便利です。こちらのリンクをご確認ください:
名前 |
キット内アイテム |
リンク |
|---|---|---|
Newton Lab Kit |
450+ |
個別に購入したい場合は、以下のリンクから購入できます。
SN |
コンポーネント |
数量 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1(10KΩ) |
||
6 |
1 |
回路図
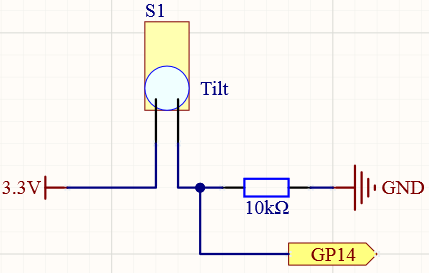
直立時(スイッチ閉):
傾きスイッチが 3.3V を GP14 に直接接続します。
GPIOピンは HIGH (1)を読み取ります。
傾いた時(スイッチ開):
傾きスイッチが 3.3V を GP14 から切り離します。
プルダウン抵抗が GP14 を GND に引き下げます。
GPIOピンは LOW (0)を読み取ります。
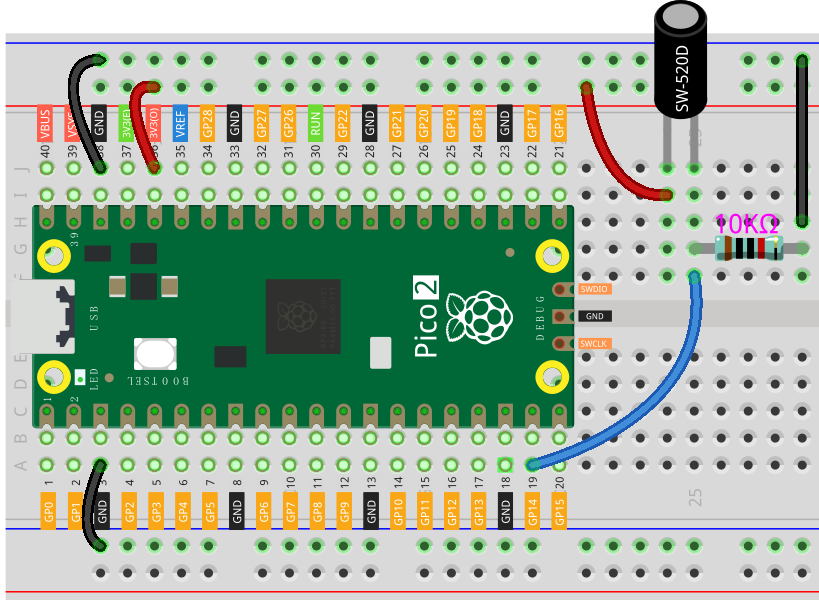
配線
コードを書く
傾きスイッチの状態を検出し、スイッチが傾いた際にメッセージを表示する簡単なMicroPythonプログラムを作成します。
注釈
2.6_tilt_switch.pyをnewton-lab-kit/micropythonから開くか、コードをThonnyにコピーして、「実行」ボタンを押すか、F5キーを押して実行してください。適切なインタープリターが選択されていることを確認してください:MicroPython(Raspberry Pi Pico)。COMxx。
import machine
import utime
# GP14を入力ピンとして初期化
tilt_switch = machine.Pin(14, machine.Pin.IN)
while True:
if tilt_switch.value() == 0:
print("Tilt detected!")
utime.sleep(1) # 複数回検出を防ぐために1秒間の遅延を追加
コードを実行すると、以下の現象が観察できます:
傾きスイッチを直立させておくと、メッセージは表示されません。
ブレッドボードやスイッチを傾けると、「傾き検出!」と表示されます。
コードの理解
モジュールのインポート:
import machine: ハードウェアコンポーネントへのアクセスを提供します。import utime: 時間に関連する関数を使用できます。
傾きスイッチのピンの初期化:
tilt_switch = machine.Pin(14, machine.Pin.IN): GP14を入力ピンとして設定します。
メインループ:
while True: 傾きスイッチの状態を常にチェックする無限ループを作成します。if tilt_switch.value() == 0: GPIOピンがLOW(0)を読み取っている場合、スイッチが傾いていることを示します。print("Tilt detected!"): 傾きが検出された際にメッセージを表示します。utime.sleep(1): スイッチのチャタリングを防ぐため、1秒間の遅延を追加します。
内部プルダウン抵抗を使用した代替配線
Raspberry Pi Pico 2では、内部プルアップまたはプルダウン抵抗を有効にすることで、外部抵抗を使用せずに済みます。
import machine
import utime
# GP14を内部プルダウン抵抗付きの入力ピンとして初期化
tilt_switch = machine.Pin(14, machine.Pin.IN, machine.Pin.PULL_DOWN)
while True:
if tilt_switch.value() == 1:
print("Tilt detected!")
utime.sleep(1)
内部プルダウン抵抗( machine.Pin.PULL_DOWN )を有効にすることで、GPIOピンは電圧がかかっていないときにデフォルトでLOWになります。
傾きスイッチが直立していると(閉じていると)、3.3VをGP14に接続し、ピンはHIGH(1)を読み取ります。
実践的な応用
向き検出:デバイスが直立しているか、傾いているかを判定できます。
動き検出によるイベント発生:動きが検出されたときにアラームや通知、アクションを起動できます。
インタラクティブプロジェクト:傾きに反応するゲームやインタラクションを制御するための入力として使用できます。
さらに実験してみよう
LEDインジケーターを追加:
別のGPIOピン(例:GP15)にLEDを接続し、適切な抵抗を挟んで、傾きが検出された際にLEDを点灯させるコードを変更しましょう。
import machine
import utime
tilt_switch = machine.Pin(14, machine.Pin.IN, machine.Pin.PULL_DOWN)
led = machine.Pin(15, machine.Pin.OUT)
while True:
if tilt_switch.value() == 1:
print("Tilt detected!")
led.value(1) # LEDを点灯
utime.sleep(1)
else:
led.value(0) # LEDを消灯
他のセンサーとの組み合わせ:
傾きスイッチを他のセンサー(例:ボタンや光センサー)と組み合わせて、より複雑なインタラクションを実現しましょう。
結論
傾きスイッチをRaspberry Pi Pico 2のプロジェクトに組み込むことで、向きや動きに基づいた新たなインタラクションを追加できます。傾きスイッチのようなデジタル入力センサーを読み取る方法を理解することで、動的で反応的な電子機器を作成する能力が広がります。