注釈
こんにちは、FacebookのSunFounder Raspberry Pi & Arduino & ESP32愛好者コミュニティへようこそ!Raspberry Pi、Arduino、ESP32について、他の愛好者と一緒に深く学びましょう。
参加する理由
専門家のサポート: 購入後の問題や技術的な課題をコミュニティとチームのサポートで解決できます。
学びと共有: ヒントやチュートリアルを交換して、スキルを向上させましょう。
独占プレビュー: 新製品の発表や先行情報をいち早く入手できます。
特別割引: 最新製品に対する独占割引を楽しめます。
祝祭プロモーションとギブアウェイ: ギブアウェイや季節限定のプロモーションに参加できます。
👉 一緒に探求し、創造しませんか?今すぐ [こちら] をクリックして参加しましょう!
3.5 小型ファン(DCモーター)の制御
このレッスンでは、 DCモーター (小型ファンのようなもの)をRaspberry Pi Pico 2と L293Dモータードライバ を使用して制御する方法を学びます。L293Dを使用すると、モーターの回転方向を制御できます—時計回りと反時計回りの両方です。DCモーターはPicoが直接供給できる電流以上を必要とするため、外部電源を使用してモーターに安全に電力を供給します。
必要なもの
このプロジェクトでは、以下のコンポーネントが必要です。
セットを購入するのが便利です。リンクはこちら:
名称 |
セット内容 |
リンク |
|---|---|---|
Newton Lab Kit |
450+ |
以下のリンクから個別に購入することもできます。
SN |
コンポーネント |
数量 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1 |
||
6 |
1 |
||
7 |
1 |
||
8 |
9V電池 |
1 |
回路図
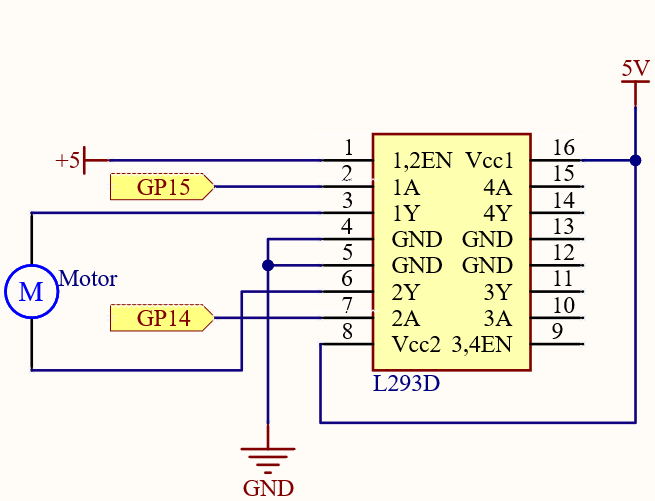
L293Dはモータードライバーチップで、ENはL293Dが動作するために5Vに接続されています。1Aと2AはそれぞれGP15とGP14に接続されており、1Yと2Yはモーターの両端に接続されています。
Y(出力)はA(入力)と同相なので、GP15とGP14に異なるレベルを与えると、モーターの回転方向を変更できます。
配線図
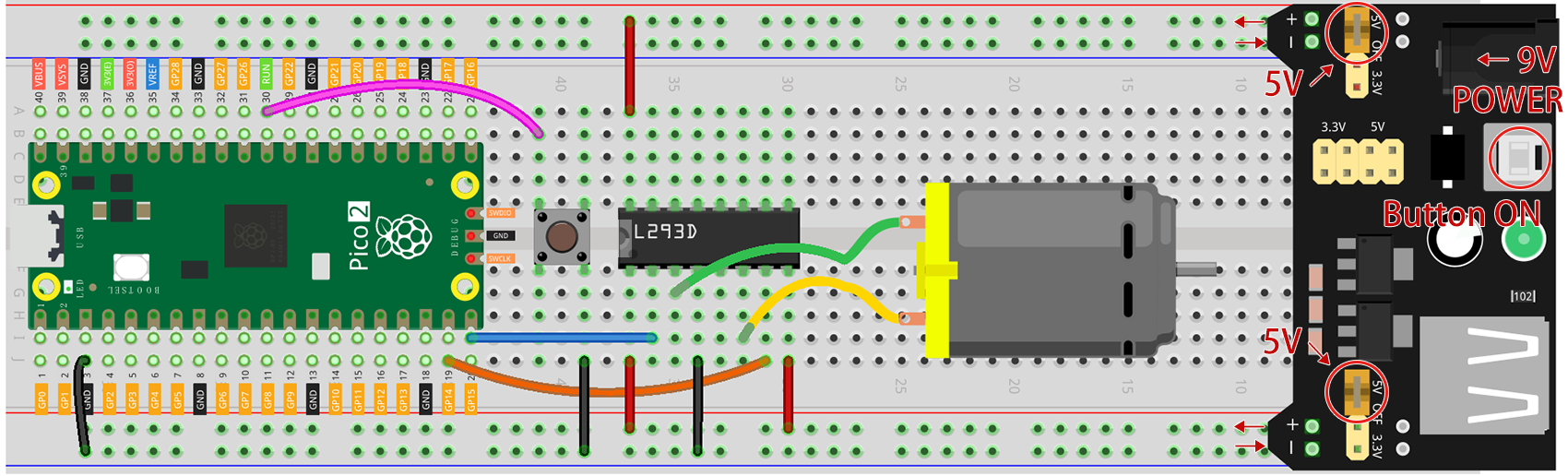
この回路では、ボタンがRUNピンに接続されていることがわかります。これは、モーターが高電流で動作するため、Picoがコンピュータから切断される可能性があり、ボタンを押すことで(Picoの RUN ピンに低レベルが入力され)リセットする必要があるからです。
DCモーターは高電流を必要とするため、ここでは安全のために電源モジュールを使用してモーターに電力を供給します。
コードの記述
モーターを制御するためのMicroPythonプログラムを作成しましょう。
注釈
3.5_small_fan.pyをnewton-lab-kit/micropythonから開くか、コードをThonnyにコピーして、「実行」ボタンを押すか、F5キーを押して実行します。正しいインタープリタ(MicroPython (Raspberry Pi Pico).COMxx)が選択されていることを確認してください。
import machine
import utime
# 制御用ピンの定義
motor_in1 = machine.Pin(14, machine.Pin.OUT)
motor_in2 = machine.Pin(15, machine.Pin.OUT)
def rotate_clockwise():
motor_in1.high()
motor_in2.low()
def rotate_counterclockwise():
motor_in1.low()
motor_in2.high()
def stop_motor():
motor_in1.low()
motor_in2.low()
while True:
rotate_clockwise()
utime.sleep(1)
stop_motor()
utime.sleep(1)
rotate_counterclockwise()
utime.sleep(1)
stop_motor()
utime.sleep(1)
コードが実行されると、モーターは1秒間時計回りに回転し、その後1秒間停止し、次に1秒間反時計回りに回転し、再度1秒間停止するというループを繰り返します。
コードの理解
ピンの初期化:
motor_in1とmotor_in2は、それぞれGP14とGP15に接続され、モーターの回転方向を制御します。motor_in1 = machine.Pin(14, machine.Pin.OUT) motor_in2 = machine.Pin(15, machine.Pin.OUT)
関数の定義:
rotate_clockwise():motor_in1をHighに、motor_in2をLowに設定してモーターを時計回りに回転させます。rotate_counterclockwise():motor_in1をLowに、motor_in2をHighに設定して反時計回りに回転させます。stop_motor():motor_in1とmotor_in2の両方をLowに設定してモーターを停止させます。
メインループ:
モーターは時計回りに回転し、停止し、反時計回りに回転し、再度停止します。それぞれ1秒間ずつ繰り返されます。
while True: rotate_clockwise() utime.sleep(1) stop_motor() utime.sleep(1) rotate_counterclockwise() utime.sleep(1) stop_motor() utime.sleep(1)
トラブルシューティングのヒント
プログラム停止後もモーターが回転し続ける:
プログラムを停止してもモーターが回転し続ける場合、Picoをリセットする必要があります。RUNピンをGNDに一時的に接続することで、Picoをリセットできます。
Picoが切断される、または応答しなくなる:
モーターが過剰な電流を引き込んでいる可能性があり、電圧の変動を引き起こしているかもしれません。モーターには別の電源を使用し、すべてのグラウンドが接続されていることを確認してください。
結論
このレッスンでは、L293DモータードライバとRaspberry Pi Pico 2を使用してDCモーターを制御する方法を学びました。これでモーターの回転方向を制御できるようになり、小型ファンやモーター駆動のデバイスなど、さまざまなプロジェクトを作成できます。
次のステップ
速度制御: PWM(パルス幅変調)を使用してモーターの速度を制御する方法を試してみましょう。EN1ピンをPWM対応のGPIOピンに接続します。
複数モーターの制御: L293Dの他のチャンネルを使用して、追加のモーターを制御します。
センサー統合: センサーを組み合わせて、入力(例えば、温度や光)に基づいてモーターを制御します。