注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
ロータリーエンコーダモジュール
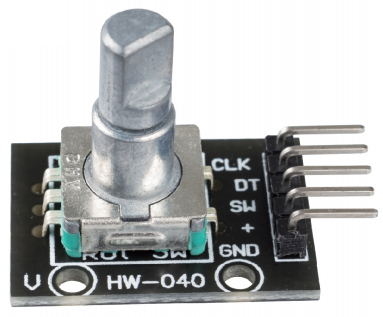
回転エンコーダは、ノブの回転を出力信号に変換し、どの方向にノブが回されたかを示す位置センサーです。
回転エンコーダはポテンショメータのデジタル版で、より多様な用途に対応しています。ポテンショメータは回転に制限がありますが、回転エンコーダは連続して回転できます。ポテンショメータは正確なノブ位置を示しますが、回転エンコーダは位置の変化を示します。
回転エンコーダには主に2種類あります:絶対エンコーダとインクリメンタル(相対)エンコーダです。このキットではインクリメンタルエンコーダが使用されています。
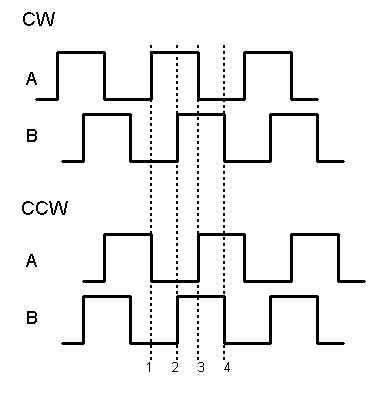
インクリメンタルエンコーダは、AチャンネルとBチャンネルとして一般に呼ばれる、90度の位相差を持つ2相の方形波を生成します。
以下に示すように、チャンネルAが高レベルから低レベルへと移行する際に、チャンネルBが高レベルにある場合、回転エンコーダが時計回り(CW)に回転していることを示します;その時にチャンネルBが低レベルにある場合は、反時計回り(CCW)の回転を意味します。したがって、チャンネルAが低レベルにある時にチャンネルBの値を読むことで、回転エンコーダの回転方向を判定できます。