Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
4.1.10 Overheat Monitor(MCP3008)
Note

Depending on your kit version, please identify whether you have ADC0834 or MCP3008 and proceed with the matching section.
Introduction
You may want to make an overheat monitoring device that applies to various situations, ex., in the factory, if we want to have an alarm and the timely automatic turning off of the machine when there is a circuit overheating. In this project, we will use thermistor, joystick, buzzer, LED and LCD to make an smart temperature monitoring device whose threshold is adjustable.
Required Components
In this project, we need the following components.
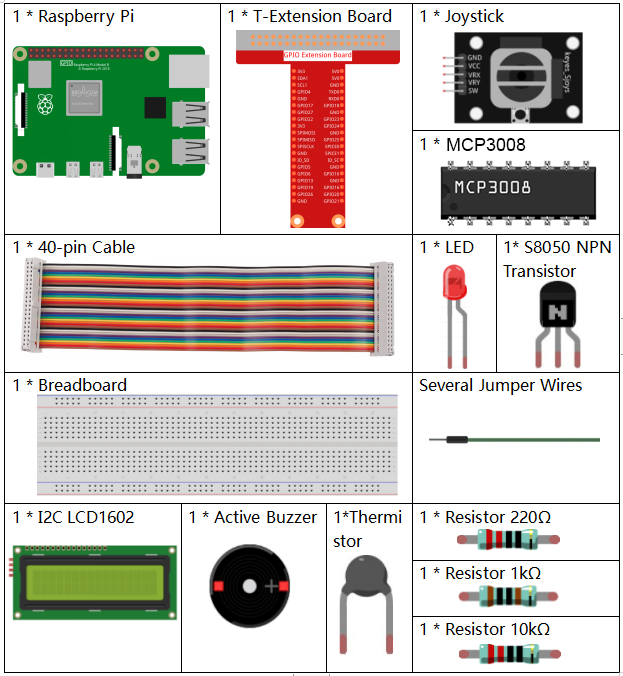
It’s definitely convenient to buy a whole kit, here’s the link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
You can also buy them separately from the links below.
COMPONENT INTRODUCTION |
PURCHASE LINK |
|---|---|
- |
|
- |
|
- |
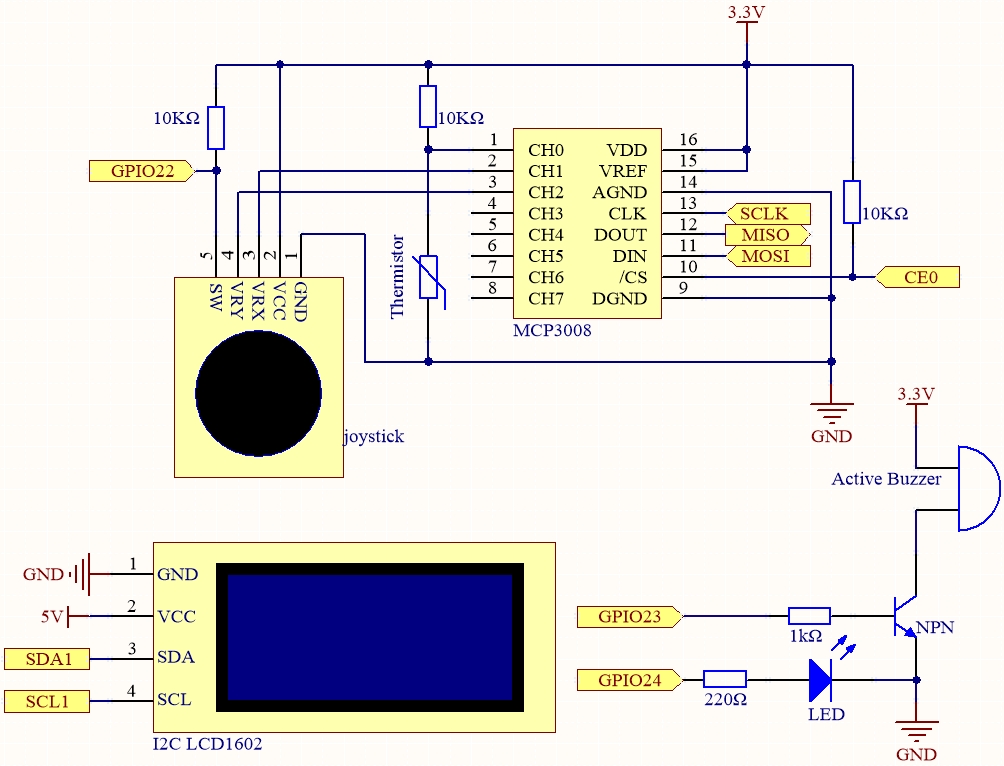
Schematic Diagram
T-Board Name |
physical |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin15 |
3 |
22 |
GPIO23 |
Pin16 |
4 |
23 |
GPIO24 |
Pin18 |
5 |
24 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
Experimental Procedures
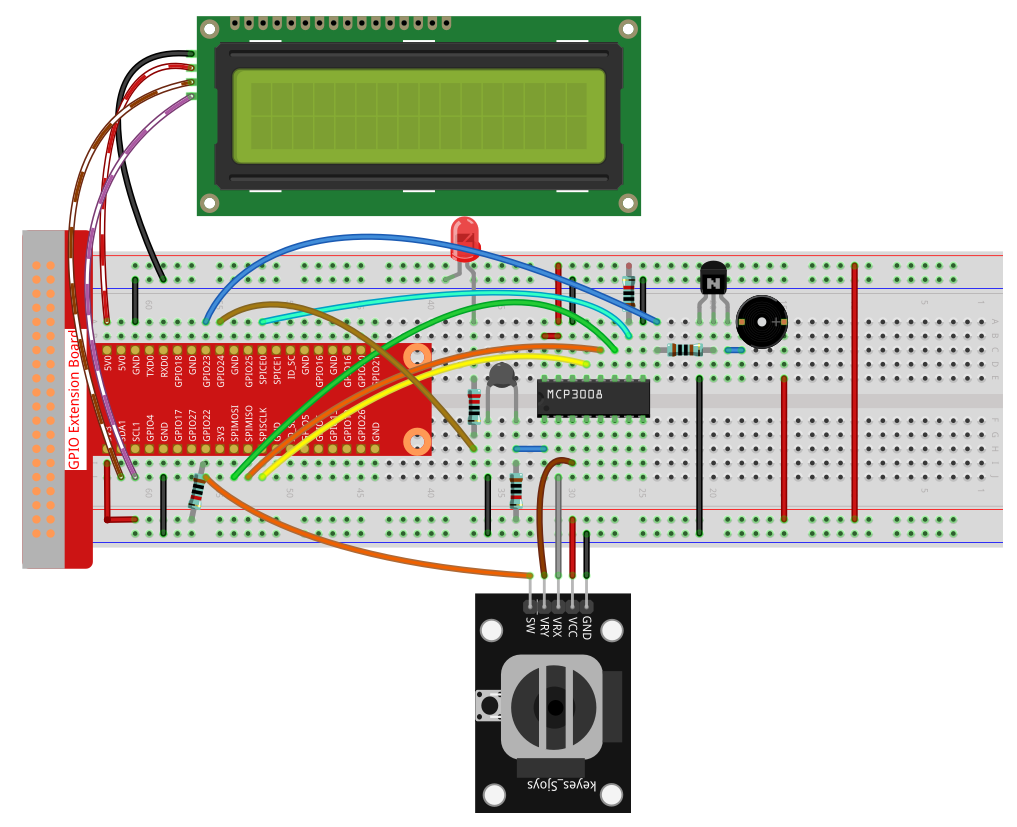
Step 1: Build the circuit.
Step 2: Set up the SPI interface and install the spidev library (see SPI Configuration for detailed instructions). If you have already completed these steps, you can skip this.
Step 3: Go to the folder of the code.
cd ~/raphael-kit/python
Step 4: Run the executable file.
sudo python3 4.1.13-2_OverheatMonitor.py
As the code runs, the current temperature and the high-temperature threshold 40 are displayed on I2C LCD1602. If the current temperature is larger than the threshold, the buzzer and LED are started to alarm you.
Joystick here is for your pressing to adjust the high-temperature threshold. Toggling the Joystick in the direction of X-axis and Y-axis can adjust (turn up or down) the current high-temperature threshold. Press the Joystick once again to reset the threshold to initial value.
Note
If you get the error
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1', you need to refer to I²C Configuration to enable the I2C.If you get
ModuleNotFoundError: No module named 'smbus2'error, please runsudo apt install python3-smbus2.If the error
OSError: [Errno 121] Remote I/O errorappears, it means the module is miswired or the module is broken.If the code and wiring are fine, but the LCD still does not display content, you can turn the potentiometer on the back to increase the contrast.
Warning
If there is an error prompt RuntimeError: Cannot determine SOC peripheral base address, please refer to If gpiozero doesn’t work.
Code
Note
You can Modify/Reset/Copy/Run/Stop the code below. But before that, you need to go to source code path like raphael-kit/python. After modifying the code, you can run it directly to see the effect.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import spidev
import time
import math
import LCD1602
# GPIO pin definitions
JOY_BTN_PIN = 22 # Button pin
BUZZER_PIN = 23 # Buzzer pin
LED_PIN = 24 # LED pin
# Initialize GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(JOY_BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(BUZZER_PIN, GPIO.OUT)
GPIO.setup(LED_PIN, GPIO.OUT)
# Set initial upper temperature threshold
upperTem = 40
# Initialize SPI for MCP3008
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000 # 1 MHz
# Initialize LCD1602
LCD1602.init(0x27, 1)
def read_adc(channel):
"""
Read analog value from MCP3008 (0–7)
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def get_joystick_value():
"""
Reads the joystick values and returns a change value based on the joystick's position.
"""
x_val = read_adc(1)
y_val = read_adc(2)
if x_val > 800:
return 1
elif x_val < 200:
return -1
elif y_val > 800:
return -10
elif y_val < 200:
return 10
else:
return 0
def upper_tem_setting():
"""
Adjusts and displays the upper temperature threshold on the LCD.
"""
global upperTem
LCD1602.write(0, 0, 'Upper Adjust: ')
change = int(get_joystick_value())
upperTem += change
strUpperTem = str(upperTem)
LCD1602.write(0, 1, strUpperTem)
LCD1602.write(len(strUpperTem), 1, ' ')
time.sleep(0.1)
def temperature():
"""
Reads the current temperature from the sensor and returns it in Celsius.
"""
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0
if Vr == 0:
return 0
Rt = 10000.0 * (3.3 - Vr) / Vr
tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0)))
Cel = tempK - 273.15
return round(Cel, 2)
def monitoring_temp():
"""
Monitors and displays the current temperature and upper temperature threshold.
Activates buzzer and LED if the temperature exceeds the upper limit.
"""
global upperTem
Cel = temperature()
LCD1602.write(0, 0, 'Temp: ')
LCD1602.write(0, 1, 'Upper: ')
LCD1602.write(6, 0, str(Cel))
LCD1602.write(7, 1, str(upperTem))
time.sleep(0.1)
if Cel >= upperTem:
GPIO.output(BUZZER_PIN, GPIO.HIGH)
GPIO.output(LED_PIN, GPIO.HIGH)
else:
GPIO.output(BUZZER_PIN, GPIO.LOW)
GPIO.output(LED_PIN, GPIO.LOW)
# Main loop
try:
lastState = GPIO.input(JOY_BTN_PIN)
stage = 0
while True:
currentState = GPIO.input(JOY_BTN_PIN)
if currentState == GPIO.HIGH and lastState == GPIO.LOW:
stage = (stage + 1) % 2
time.sleep(0.1)
LCD1602.clear()
lastState = currentState
if stage == 1:
upper_tem_setting()
else:
monitoring_temp()
except KeyboardInterrupt:
pass
finally:
LCD1602.clear()
GPIO.cleanup()
spi.close()
Code Explanation
Import Libraries
This section loads the required libraries for GPIO, SPI, LCD display, time delays, and math operations.
#!/usr/bin/env python3 import RPi.GPIO as GPIO import spidev import time import math import LCD1602
GPIO and Device Setup
Define GPIO pin numbers for the joystick button, buzzer, and LED, and configure GPIO modes.
JOY_BTN_PIN = 22 # Button pin BUZZER_PIN = 23 # Buzzer pin LED_PIN = 24 # LED pin GPIO.setmode(GPIO.BCM) GPIO.setup(JOY_BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(BUZZER_PIN, GPIO.OUT) GPIO.setup(LED_PIN, GPIO.OUT)
SPI and LCD Initialization
Start the SPI interface for MCP3008 and initialize the LCD1602 screen with I2C address 0x27.
upperTem = 40 spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000 LCD1602.init(0x27, 1)
Read ADC Value
Reads analog data from MCP3008 ADC via SPI. Channel should be in range 0–7.
def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
Joystick Movement Detection
Checks X/Y axis values from the joystick and returns how much to change the threshold.
def get_joystick_value(): x_val = read_adc(1) y_val = read_adc(2) if x_val > 800: return 1 elif x_val < 200: return -1 elif y_val > 800: return -10 elif y_val < 200: return 10 else: return 0
Adjust Upper Temperature Threshold
Displays “Upper Adjust” on the LCD and adjusts the threshold using joystick input.
def upper_tem_setting(): global upperTem LCD1602.write(0, 0, 'Upper Adjust: ') change = int(get_joystick_value()) upperTem += change strUpperTem = str(upperTem) LCD1602.write(0, 1, strUpperTem) LCD1602.write(len(strUpperTem), 1, ' ') time.sleep(0.1)
Temperature Calculation
Converts analog sensor reading to voltage, resistance, and finally temperature (Celsius) using Steinhart–Hart approximation.
def temperature(): analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 if Vr == 0: return 0 Rt = 10000.0 * (3.3 - Vr) / Vr tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0))) Cel = tempK - 273.15 return round(Cel, 2)
Temperature Monitoring
Continuously checks and displays temperature and upper limit. Turns on buzzer and LED if temperature exceeds the threshold.
def monitoring_temp(): global upperTem Cel = temperature() LCD1602.write(0, 0, 'Temp: ') LCD1602.write(0, 1, 'Upper: ') LCD1602.write(6, 0, str(Cel)) LCD1602.write(7, 1, str(upperTem)) time.sleep(0.1) if Cel >= upperTem: GPIO.output(BUZZER_PIN, GPIO.HIGH) GPIO.output(LED_PIN, GPIO.HIGH) else: GPIO.output(BUZZER_PIN, GPIO.LOW) GPIO.output(LED_PIN, GPIO.LOW)
Main Program Logic
Toggles between temperature monitoring and threshold setting modes when the joystick button is pressed.
try: lastState = GPIO.input(JOY_BTN_PIN) stage = 0 while True: currentState = GPIO.input(JOY_BTN_PIN) if currentState == GPIO.HIGH and lastState == GPIO.LOW: stage = (stage + 1) % 2 time.sleep(0.1) LCD1602.clear() lastState = currentState if stage == 1: upper_tem_setting() else: monitoring_temp()
Cleanup on Exit
Ensures proper shutdown of GPIO and SPI resources when Ctrl+C is pressed.
except KeyboardInterrupt: pass finally: LCD1602.clear() GPIO.cleanup() spi.close()