Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
4.1.8 Welcome
Introduction
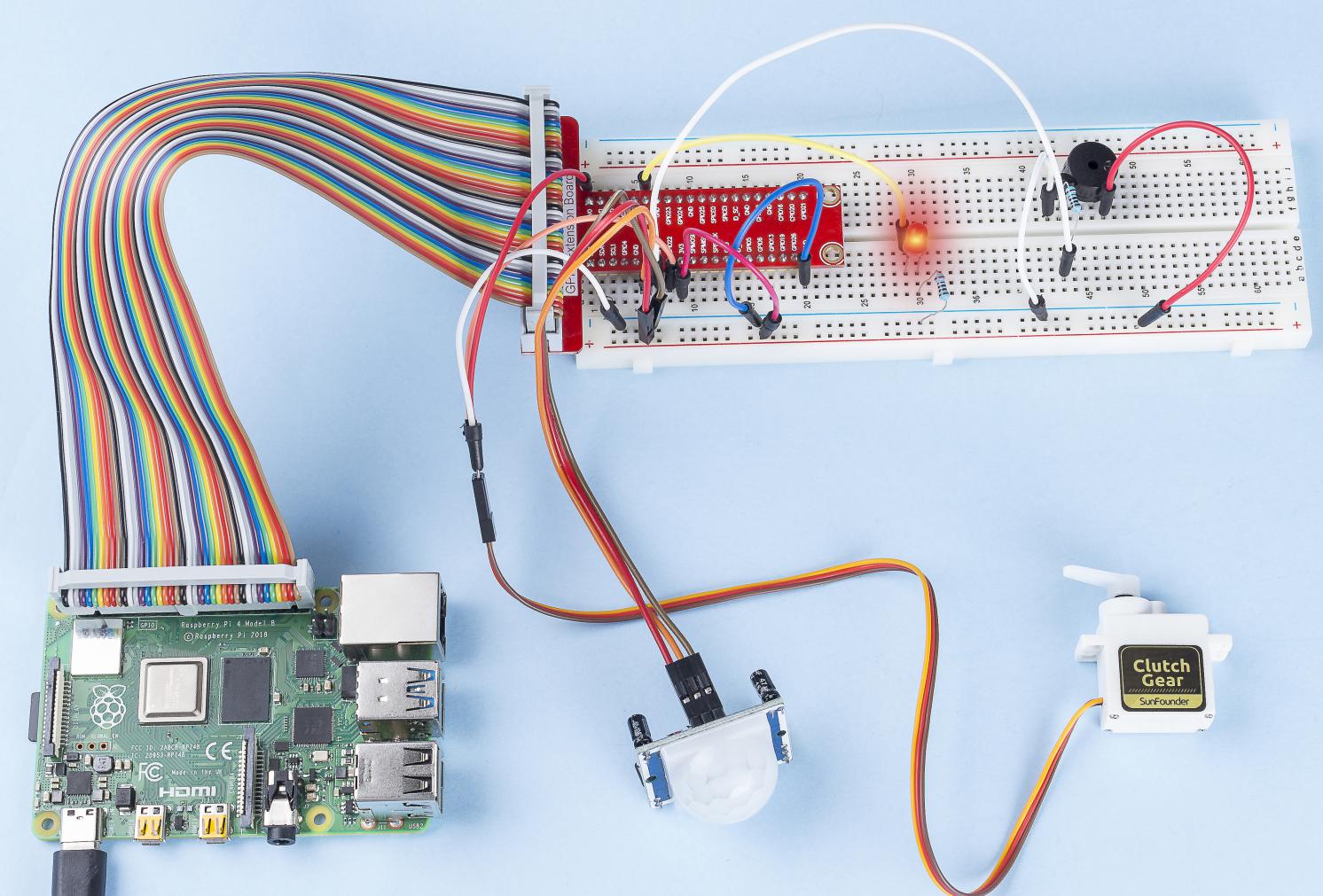
In this project, we will use PIR to sense the movement of pedestrians, and use servos, LED, buzzer to simulate the work of the sensor door of the convenience store. When the pedestrian appears within the sensing range of the PIR, the indicator light will be on, the door will be opened, and the buzzer will play the opening bell.
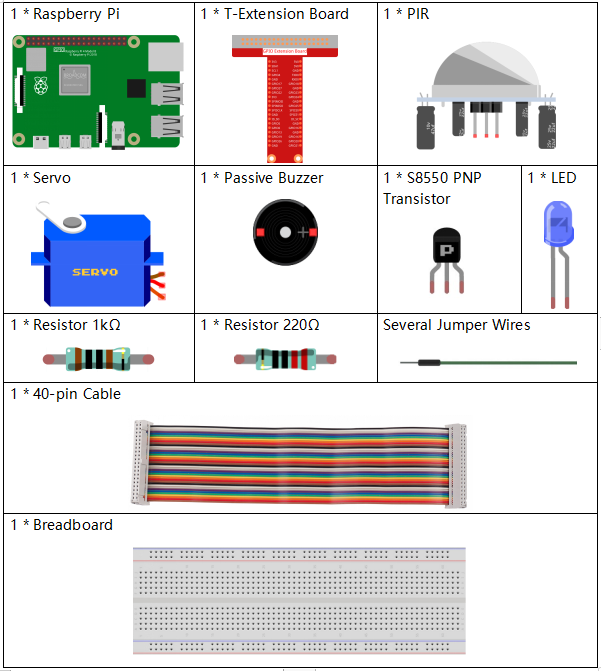
Required Components
In this project, we need the following components.
It’s definitely convenient to buy a whole kit, here’s the link:
Name |
ITEMS IN THIS KIT |
LINK |
|---|---|---|
Raphael Kit |
337 |
You can also buy them separately from the links below.
COMPONENT INTRODUCTION |
PURCHASE LINK |
|---|---|
- |
|
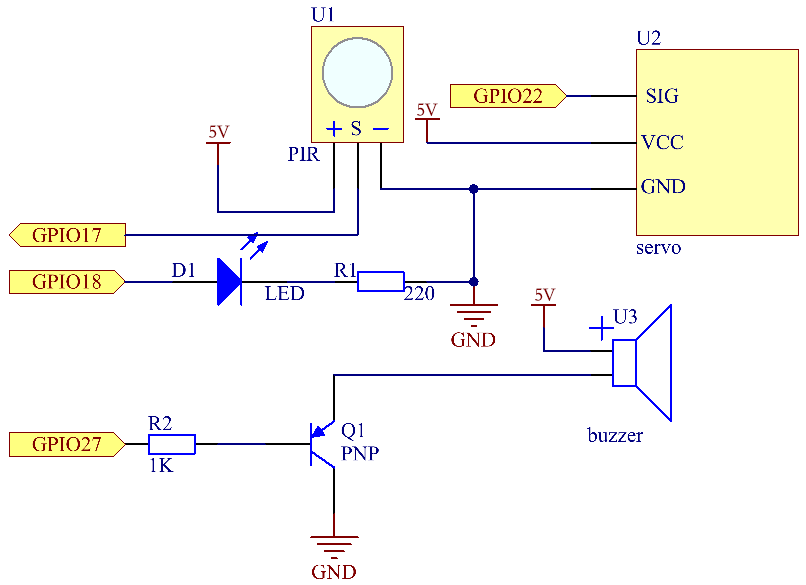
Schematic Diagram
T-Board Name |
physical |
wiringPi |
BCM |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
Experimental Procedures
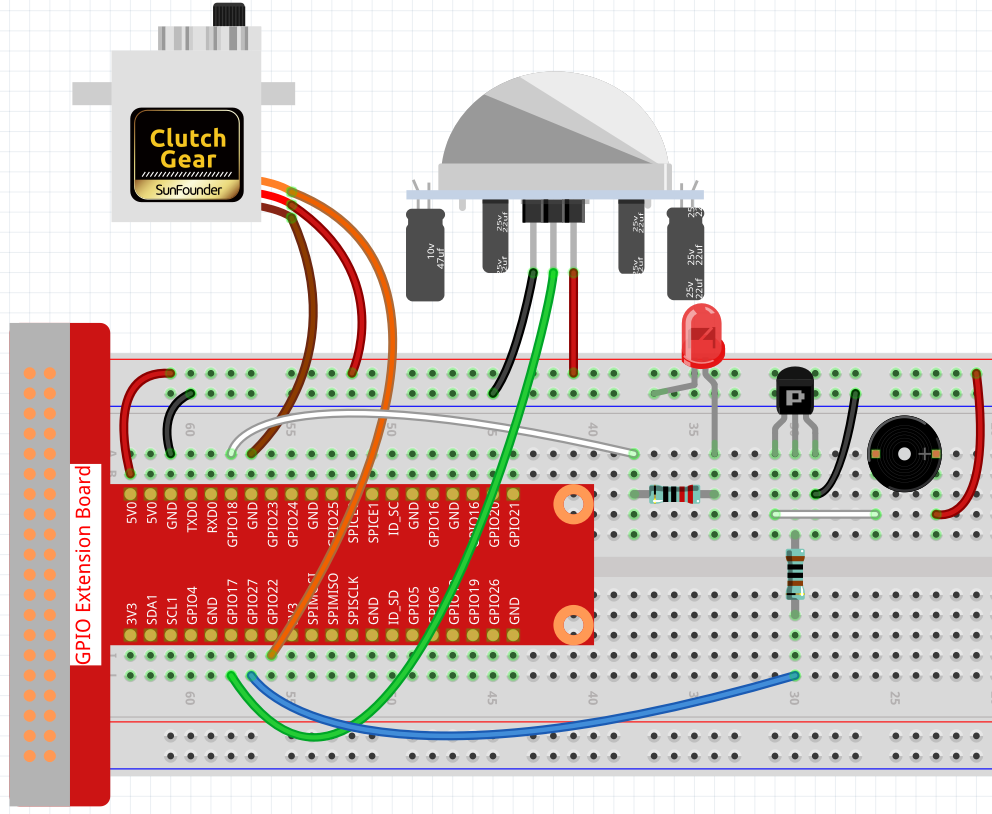
Step 1: Build the circuit.
Step 2: Change directory.
cd ~/raphael-kit/python/
Step 3: Run.
sudo python3 4.1.8_Welcome.py
After the code runs, if the PIR sensor detects someone passing by, the door will automatically open (simulated by the servo), turn on the indicator and play the doorbell music. After the doorbell music plays, the system will automatically close the door and turn off the indicator light, waiting for the next time someone passes by.
There are two potentiometers on the PIR module: one is to adjust sensitivity and the other is to adjust the detection distance. To make the PIR module work better, you You need to turn both of them counterclockwise to the end.

Code
Note
You can Modify/Reset/Copy/Run/Stop the code below. But before that, you need to go to source code path like raphael-kit/python. After modifying the code, you can run it directly to see the effect.
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import time
SERVO_MIN_PULSE = 500
SERVO_MAX_PULSE = 2500
ledPin = 18 # define the ledPin
pirPin = 17 # define the sensorPin
servoPin = 22 # define the servoPin
buzPin = 27 # define the buzzerpin
CL = [0, 131, 147, 165, 175, 196, 211, 248] # Frequency of Low C notes
CM = [0, 262, 294, 330, 350, 393, 441, 495] # Frequency of Middle C notes
CH = [0, 525, 589, 661, 700, 786, 882, 990] # Frequency of High C notes
song = [ CH[5],CH[2],CM[6],CH[2],CH[3],CH[6],CH[3],CH[5],CH[3],CM[6],CH[2] ]
beat = [ 1,1,1,1,1,2,1,1,1,1,1,]
def setup():
global p
global Buzz # Assign a global variable to replace GPIO.PWM
GPIO.setmode(GPIO.BCM) # Numbers GPIOs by physical location
GPIO.setup(ledPin, GPIO.OUT) # Set ledPin's mode is output
GPIO.setup(pirPin, GPIO.IN) # Set sensorPin's mode is input
GPIO.setup(servoPin, GPIO.OUT) # Set servoPin's mode is output
GPIO.output(servoPin, GPIO.LOW) # Set servoPin to low
GPIO.setup(buzPin, GPIO.OUT) # Set pins' mode is output
Buzz = GPIO.PWM(buzPin, 440) # 440 is initial frequency.
Buzz.start(50) # Start Buzzer pin with 50% duty ration
p = GPIO.PWM(servoPin, 50) # set Frequece to 50Hz
p.start(0) # Duty Cycle = 0
def map(value, inMin, inMax, outMin, outMax):
return (outMax - outMin) * (value - inMin) / (inMax - inMin) + outMin
def setAngle(angle): # make the servo rotate to specific angle (0-180 degrees)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)#map the angle to duty cycle and output it
def doorbell():
for i in range(1, len(song)): # Play song 1
Buzz.ChangeFrequency(song[i]) # Change the frequency along the song note
time.sleep(beat[i] * 0.25) # delay a note for beat * 0.25s
time.sleep(1) # Wait a second for next song.
def closedoor():
GPIO.output(ledPin, GPIO.LOW)
for i in range(180, -1, -1): #make servo rotate from 180 to 0 deg
setAngle(i)
time.sleep(0.001)
time.sleep(1)
def opendoor():
GPIO.output(ledPin, GPIO.HIGH)
for i in range(0, 181, 1): #make servo rotate from 0 to 180 deg
setAngle(i) # Write to servo
time.sleep(0.001)
time.sleep(1)
doorbell()
closedoor()
def loop():
while True:
if GPIO.input(pirPin)==GPIO.HIGH:
opendoor()
def destroy():
GPIO.cleanup() # Release resource
p.stop()
Buzz.stop()
if __name__ == '__main__': # Program start from here
setup()
try:
loop()
except KeyboardInterrupt: # When 'Ctrl+C' is pressed, the program destroy() will be executed.
destroy()
Code Explanation
def setup():
global p
global Buzz # Assign a global variable to replace GPIO.PWM
GPIO.setmode(GPIO.BCM) # Numbers GPIOs by physical location
GPIO.setup(ledPin, GPIO.OUT) # Set ledPin's mode is output
GPIO.setup(pirPin, GPIO.IN) # Set sensorPin's mode is input
GPIO.setup(buzPin, GPIO.OUT) # Set pins' mode is output
Buzz = GPIO.PWM(buzPin, 440) # 440 is initial frequency.
Buzz.start(50) # Start Buzzer pin with 50% duty ration
GPIO.setup(servoPin, GPIO.OUT) # Set servoPin's mode is output
GPIO.output(servoPin, GPIO.LOW) # Set servoPin to low
p = GPIO.PWM(servoPin, 50) # set Frequece to 50Hz
p.start(0) # Duty Cycle = 0
These statements are used to initialize the pins of each component.
def setAngle(angle): # make the servo rotate to specific angle (0-180 degrees)
angle = max(0, min(180, angle))
pulse_width = map(angle, 0, 180, SERVO_MIN_PULSE, SERVO_MAX_PULSE)
pwm = map(pulse_width, 0, 20000, 0, 100)
p.ChangeDutyCycle(pwm)#map the angle to duty cycle and output it
Create a function, servowrite to write the angle in the servo that is 0-180.
def doorbell():
for i in range(1,len(song)): # Play song1
Buzz.ChangeFrequency(song[i]) # Change the frequency along the song note
time.sleep(beat[i] * 0.25) # delay a note for beat * 0.25s
Create a function, doorbell to enable the buzzer to play music.
def closedoor():
GPIO.output(ledPin, GPIO.LOW)
Buzz.ChangeFrequency(1)
for i in range(180, -1, -1): #make servo rotate from 180 to 0 deg
setAngle(i)
time.sleep(0.001)
Close the door and turn off the indicator light.
def opendoor():
GPIO.output(ledPin, GPIO.HIGH)
for i in range(0, 181, 1): #make servo rotate from 0 to 180 deg
setAngle(i) # Write to servo
time.sleep(0.001)
doorbell()
closedoor()
The function, opendoor() consists of several parts: turn on the
indicator light, turn the servo (to simulate the action of opening the
door), play the doorbell music of the convenience store, and call the
function , closedoor() after playing music.
def loop():
while True:
if GPIO.input(pirPin)==GPIO.HIGH:
opendoor()
When PIR senses that someone is passing by, it calls the function,
opendoor() .
Phenomenon Picture