注釈
こんにちは!FacebookのSunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Communityへようこそ!Raspberry Pi、Arduino、ESP32について、仲間たちと一緒にさらに深く学びましょう。
参加する理由は?
専門的なサポート:コミュニティとチームの助けを借りて、購入後の問題や技術的な課題を解決できます。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換しましょう。
限定プレビュー:新製品の発表や先行公開情報をいち早くチェックできます。
特別割引:最新製品を特別価格でお得に購入できます。
季節限定プロモーションやプレゼント企画:プレゼント企画や特別なプロモーションに参加できます。
👉 一緒に探索し、創造を楽しみませんか?[ここ] をクリックして今すぐ参加しましょう!
サーボモーター

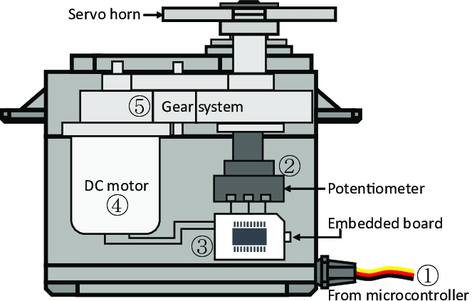
サーボモーターは通常、ケース、シャフト、ギアシステム、ポテンショメータ、DCモーター、組み込み制御基板で構成されています。
動作原理 - マイクロコントローラーは、シグナルピンを通じてサーボにPWM信号を送信します。 - サーボ内の組み込み制御基板は、これらの信号を解釈し、それに応じてモーターの動作を調整します。 - モーターはギアシステムを駆動し、これにより速度が低下しトルクが増加し、最終的にシャフトが回転します。 - シャフトは機械的にポテンショメータに接続されています。シャフトが回転すると、シャフトの位置に比例する電圧信号を生成するポテンショメータが動きます。 - このフィードバック信号は組み込み制御基板に送信され、現在の位置と目標位置とを比較します。 - この比較に基づいて、基板はモーターの方向と速度を調整し、サーボが正確に所望の位置で停止し保持することを可能にします。 - この閉ループフィードバックシステムにより、サーボの動きの精度と安定性が保証されます。
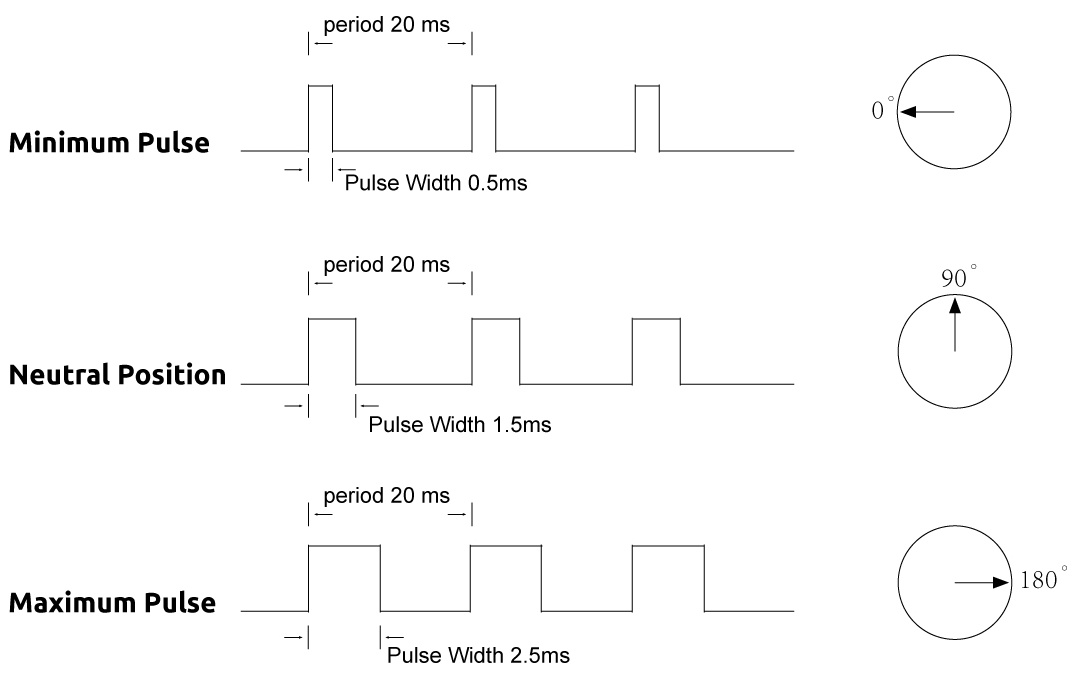
制御線に適用されるパルスの持続時間によって角度が決定されます。これはパルス幅変調と呼ばれます。サーボは20 msごとにパルスを受け取ることを期待しています。パルスの長さがモーターが回転する距離を決定します。たとえば、1.5msのパルスはモーターを90度位置(ニュートラル位置)に回転させます。 1.5 ms未満のパルスがサーボに送られると、サーボはニュートラルポイントから反時計回りに数度回転してその位置で出力シャフトを保持します。パルスが1.5 msより広い場合は反対のことが起こります。サーボが有効な位置に回転するための最小幅と最大幅のパルスは、各サーボによって異なります。一般的に最小パルスは約0.5 ms、最大パルスは2.5 msの幅です。
例
3.7 サーボモーターの振動 (MicroPythonユーザー向け)
7.11 身体感覚コントローラーの作成 (MicroPythonユーザー向け)
8.8 @SunFounder Controllerで遊ぼう (MicroPythonユーザー向け)
8.16 Bluetoothロックコントローラー (MicroPythonユーザー向け)
3.7 サーボモーターの制御 (Arduinoユーザー向け)