注釈
こんにちは、SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Communityへようこそ!仲間たちと一緒にRaspberry Pi、Arduino、ESP32についてさらに深く学びましょう。
参加する理由は?
専門家のサポート: コミュニティやチームの助けを借りて、購入後の問題や技術的な課題を解決できます。
学びと共有: ヒントやチュートリアルを交換して、スキルを向上させましょう。
限定プレビュー: 新製品の発表や先行情報をいち早く手に入れましょう。
特別割引: 最新製品の特別割引をお楽しみください。
イベント・プレゼント: プレゼント企画や祝日セールに参加しましょう。
👉 一緒に探求し、創造を楽しみませんか?[ここ]をクリックして、今すぐ参加しましょう!
8.8 @SunFounder Controllerで遊ぼう
このプロジェクトでは、Sunfounder Controllerアプリを使用してリモートプロジェクトを構築する方法を学びます。 LAN環境では、Pico 2 Wの回路をスマートフォンやタブレットで制御することができます。 Pico 2 Wでシンプルなロボットを作りたい場合、このアプリは非常に便利です。
ここでは、アプリのスライダーバーを使用してサーボの角度を制御し、アプリのゲージで超音波センサーが検出した距離を表示します。
1. 必要なコンポーネント
このプロジェクトでは、以下のコンポーネントが必要です。
キット一式を購入するのが便利です。こちらのリンクから購入できます:
名前 |
このキットに含まれるアイテム |
リンク |
|---|---|---|
Pico 2 W スターターキット |
450以上 |
別々に購入することもできます。以下のリンクから購入可能です。
SN |
コンポーネント |
数量 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USBケーブル |
1 |
|
3 |
1 |
||
4 |
複数 |
||
5 |
1 |
||
6 |
1 |
||
7 |
1 |
||
8 |
Power Pack |
1 |
2. 回路を組み立てる
警告
Li-po充電モジュールが図のように接続されていることを確認してください。そうしないと、短絡が原因でバッテリーや回路が損傷する可能性があります。

3. SunFounder Controllerをセットアップする
SunFounder Controller APP を APP Store(iOS) または Google Play(Android) からインストールします。
アプリを開き、ホームページで + ボタンをクリックしてコントローラーを作成します。

ここで Blank と Dual Stick を選択します。

これで空のコントローラーが作成されます。

H エリアをクリックし、 Slider ウィジェットを追加します。

コントロールのギアをクリックして、設定ウィンドウを開きます。

最大値を180、最小値を0に設定し、 確認 をクリックします。

L エリアをクリックし、 Gauge ウィジェットを追加します。

ゲージのギアをクリックして設定ウィンドウを開き、最大値を100、最小値を0、単位をcmに設定します。

ウィジェットの設定が完了したら、保存をクリックします。

4. コードを実行する
注釈
Pico 2 Wが現在Anvilファームウェアを使用している場合、 1.3 MicroPythonをPico 2 Wにインストール が必要です。
pico-2w-kit-main/micropython/libsのパスからws.pyとwebsocket_helper.pyをRaspberry Pi Pico 2 Wにアップロードします。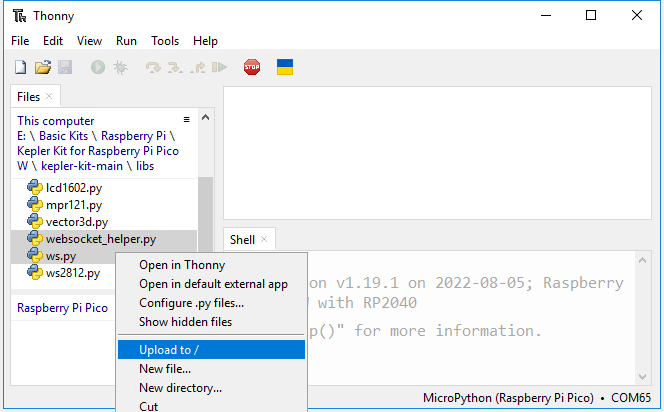
ws.pyスクリプトをダブルクリックし、WiFiのSSIDとPASSWORDを入力します。
pico-2w-kit-main/micropython/iotのパスにある9_sunfounder_controller.pyを開き、 現在のスクリプトを実行 ボタンをクリックするか、F5を押して実行します。接続が成功すると、Pico 2 WのIPアドレスが表示されます。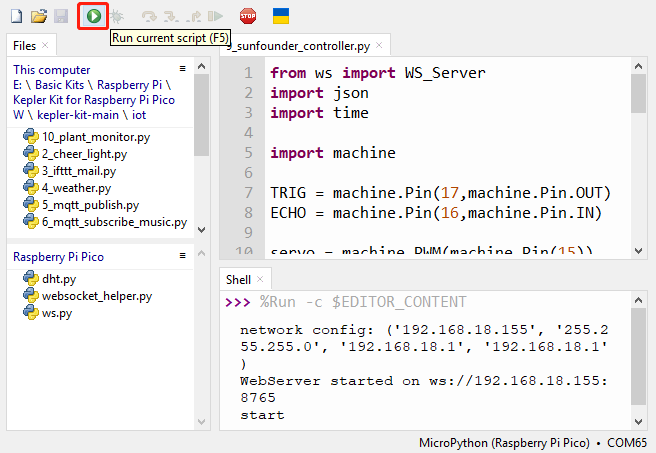
注釈
このスクリプトを起動時に実行できるようにするには、Raspberry Pi Pico 2 Wに
main.pyとして保存できます。SunFounder Controllerアプリに戻り、 接続 ボタンをクリックします。

Pico Wが検出された場合、直接タップして接続します。

自動で検索されない場合は、手動でIPを入力して接続できます。

実行ボタンをクリックした後、Hエリアのスライダーバーをスライドさせると、サーボが角度を調整します。Lエリアのゲージは、手が超音波センサーから100cm以内にある場合、その距離を表示します。

仕組みは?
ws.py ライブラリの WS_Server クラスは、アプリとの通信を実装しています。以下はその基本機能を実装するためのフレームワークです。
from ws import WS_Server
import json
import time
ws = WS_Server(8765) # WebSocketを初期化
def main():
ws.start()
while True:
status,result=ws.transfer()
time.sleep_ms(100)
try:
main()
finally:
ws.stop()
まず、 WS_Server オブジェクトを作成する必要があります。
ws = WS_Server(8765)
次に、 ws.start() を呼び出してWebSocketを開始します。
ws.start()
次に、 while True ループを使用して、Pico 2 WとSunFounder Controllerアプリ間でデータ転送を行います。
while True:
# WebSocketデータ転送
status,result = ws.transfer()
# データ転送のステータス
print(status)
# 受信したデータ
print(result)
# 送信したデータ
print(ws.send_dict)
time.sleep_ms(100)
status が False の場合、SunFounder Controllerアプリからデータを取得できなかったことを意味します。
そして、 result はPico 2 WがSunFounder Controllerアプリから取得したデータです。
出力すると、次のようなデータが表示されます。これはすべてのウィジェットエリアの値です。
{'C': None, 'B': None, 'M': None,,,,, 'A': None, 'R': None}
この場合、Hエリアの値を個別に表示して、それを回路の操作に使用します。
status,result=ws.transfer()
#print(result)
if status == True:
print(result['H'])
ws.send_dict 辞書は、Pico 2 WがSunFounder Controllerアプリに送信するデータです。これは WS_Server クラスで作成され、 ws.transfer() が実行されると送信されます。
そのメッセージは以下のように表示されます。
{'Check': 'SunFounder Controller', 'Name': 'Pico2W', 'Type': 'Blank'}
これは空のメッセージです。これをSunFounder Controllerアプリのウィジェットにコピーするには、対応するエリアに値を割り当てる必要があります。例えば、Lエリアに値 50 を割り当てます。
ws.send_dict['L'] = 50
データは以下のように表示されます。
{'L': 50, 'Type': 'Blank', 'Name': 'Pico2W', 'Check': 'SunFounder Controller'}
SunFounder Controllerの詳細な使い方については、 SunFounder Controller APP を参照してください。