Nota
Ciao, benvenuto nella community SunFounder per appassionati di Raspberry Pi, Arduino e ESP32 su Facebook! Approfondisci la tua conoscenza di Raspberry Pi, Arduino e ESP32 con altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e anteprime.
Sconti speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca [qui] e unisciti oggi!
Lezione 9: Compagno di esplorazione marziana
Ora che il nostro Rover può evitare abilmente gli ostacoli, insegniamogli un nuovo trucco: seguire un bersaglio! In questa missione, trasformeremo il nostro rover evita-ostacoli in un fedele compagno che può seguirti ovunque.
Qual è la differenza tra seguire ed evitare?
Evitare: Allontanarsi dagli oggetti (come schivare rocce)
Seguire: Muoversi verso gli oggetti (come seguire un amico)
Preparati a programmare il tuo compagno di esplorazione marziana!
Obiettivi di apprendimento
Combinare sensori a ultrasuoni e infrarossi per creare un rover inseguitore
Programmare il tuo Mars Rover per tracciare e seguire automaticamente un bersaglio in movimento
Creare il tuo rover inseguitore
Prima, Collegare l’APP al GalaxyRVR.
Ora, apri il tuo progetto salvato nella Lezione 8.
Salva una copia per mantenere al sicuro il tuo progetto originale. Clicca «Save as a copy».
Dai al tuo nuovo progetto un nome divertente come «Mars Follower» o «Rover Buddy».
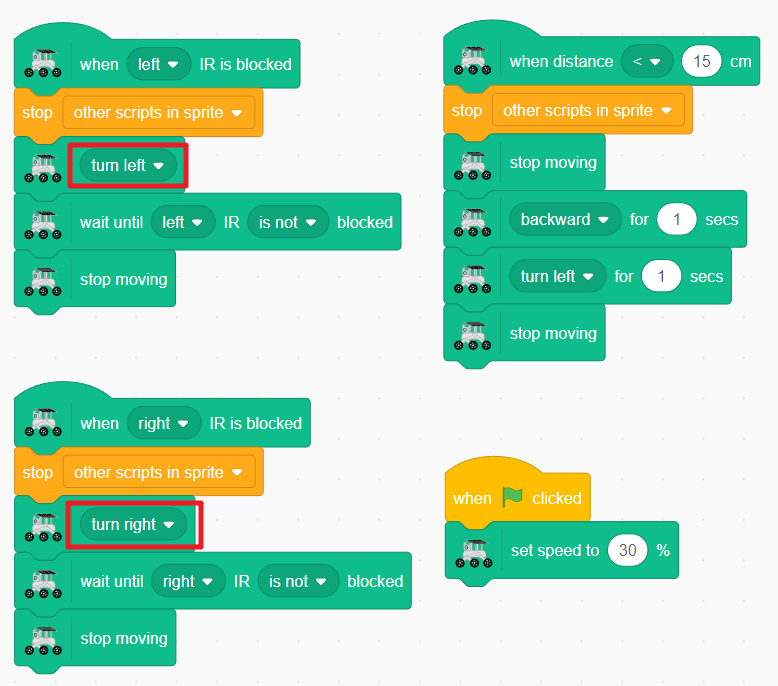
Rimuovi i blocchi «move forward» dalla fine di ogni evento del sensore. Il nostro inseguitore dovrebbe fermarsi e aspettare dopo ogni azione.
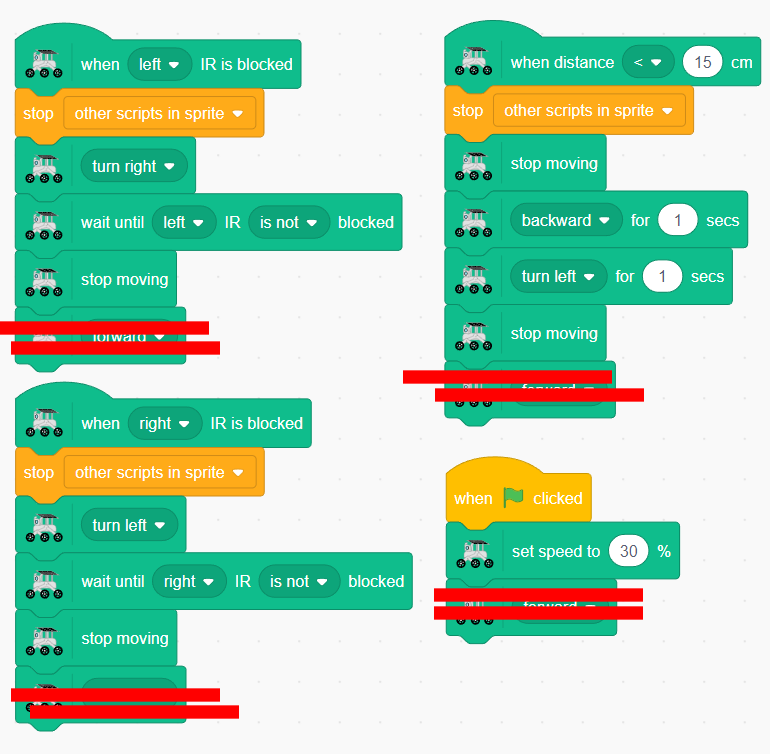
Ora riprogrammiamo i sensori IR! Cambia le direzioni di rotazione in modo che il rover giri VERSO il bersaglio invece che lontano da esso.
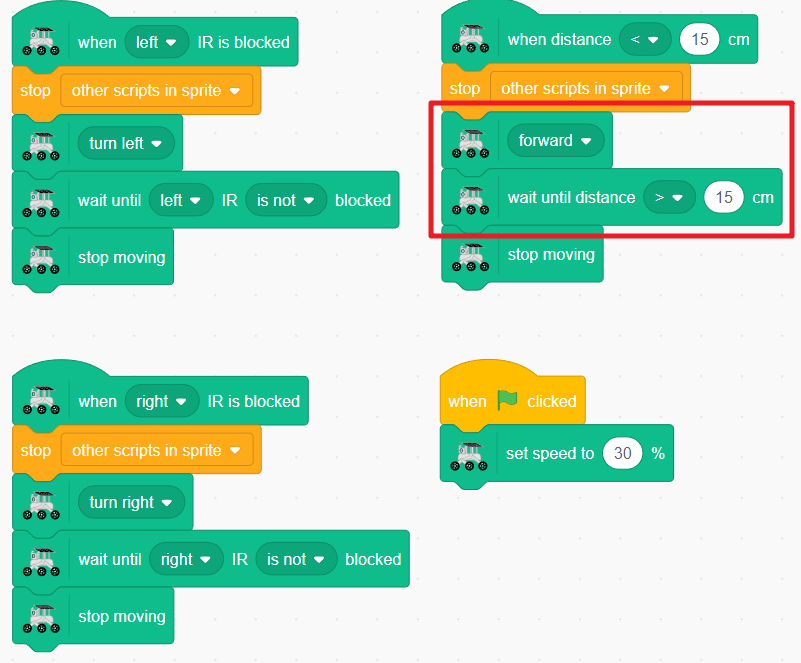
Infine, aggiorna il comportamento del sensore a ultrasuoni. Invece di indietreggiare, fallo muovere IN AVANTI quando rileva un bersaglio di fronte.
Fantastico! Il tuo GalaxyRVR è ora il tuo compagno di esplorazione marziana. Provalo:
Cammina accanto ad esso → gira per affrontarti
Stai di fronte → si muove verso di te
Allontanati → si ferma e aspetta
Il tuo rover compagno è pronto a seguirti nella tua prossima avventura spaziale!