Nota
Ciao, benvenuto nella community SunFounder per appassionati di Raspberry Pi, Arduino e ESP32 su Facebook! Approfondisci la tua conoscenza di Raspberry Pi, Arduino e ESP32 con altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e anteprime.
Sconti speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca [qui] e unisciti oggi!
Lezione 4: Modulo a ultrasuoni
Dai al tuo GalaxyRVR il potere di «vedere» con il suono!
Scopri come i sensori a ultrasuoni funzionano come l’ecolocalizzazione di un pipistrello, inviando onde sonore e ascoltando gli echi per rilevare ostacoli e misurare distanze.
Rendi il tuo Mars Rover più intelligente e sicuro mentre esplora!
Obiettivi di apprendimento
Scoprire come i sensori a ultrasuoni usano le onde sonore per misurare la distanza
Imparare a leggere le misurazioni di distanza usando l’app Mammoth Coding
Programmare il GalaxyRVR per evitare ostacoli usando il sensore a ultrasuoni
Esplorare il modulo a ultrasuoni
Ecco il sensore a ultrasuoni HC-SR04, il nuovo «superpotere» del tuo rover per vedere le distanze senza toccare nulla! Proprio come i pipistrelli usano il suono per navigare, questo ingegnoso dispositivo può rilevare oggetti da 2 cm a 400 cm di distanza.

I quattro pin importanti:
TRIG - Il «pulsante di avvio» che dice al sensore di inviare onde sonore
ECHO - Ascolta l’eco di ritorno dagli oggetti
VCC - Connessione di alimentazione (necessita di 5V)
GND - Connessione a terra (completa il circuito)
Come funziona - Il gioco dell’eco:
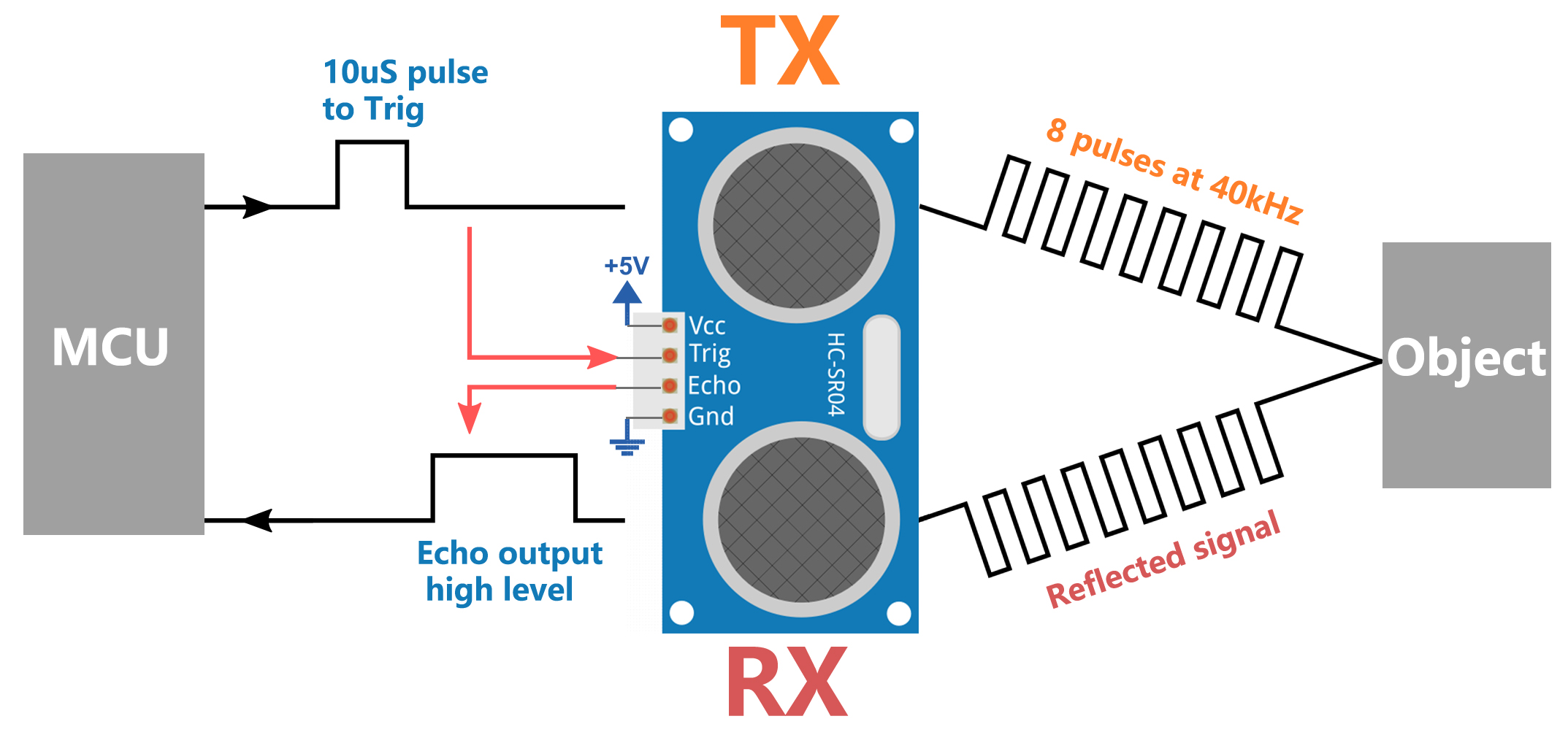
AVVIO - Il sensore invia 8 rapide onde sonore (troppo acute per essere udite!)
ASCOLTO - Inizia a cronometrare e attende che l’eco rimbalzi
CALCOLO - Usando il tempo dell’eco, calcola: Distanza = (Tempo × Velocità del suono) ÷ 2
Pensalo come gridare in un canyon e contare quanto tempo ci vuole per sentire l’eco. Più lunga è l’attesa, più lontana è la parete!
Ora diamo al tuo Mars Rover questo incredibile superpotere!
Testare il sensore a ultrasuoni
Prima, Collegare l’APP al GalaxyRVR.
Trova il blocco «distance in cm» nella categoria GalaxyRVR e seleziona la sua casella.
La lettura del sensore apparirà ora in diretta sullo stage.
Agita la mano davanti al sensore a ultrasuoni e guarda il numero cambiare: sta misurando la distanza in centimetri!
Creare un rover che evita gli ostacoli
Programmiamo il tuo GalaxyRVR per evitare automaticamente gli ostacoli usando il sensore a ultrasuoni.
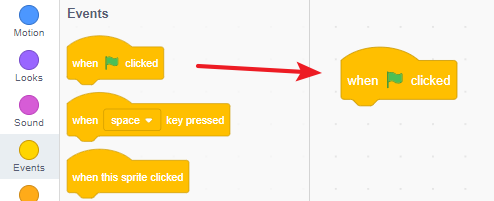
Inizia con il blocco bandiera verde.
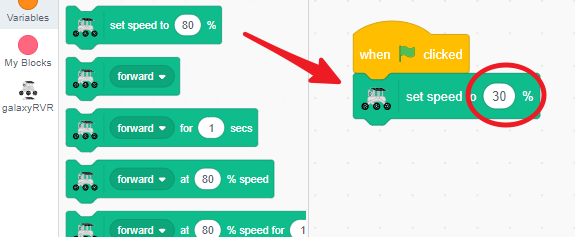
Imposta una velocità confortevole (consigliamo il 30%) per i test.
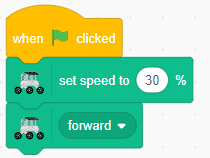
Aggiungi un blocco «move forward» così il rover continua a muoversi quando il percorso è libero.
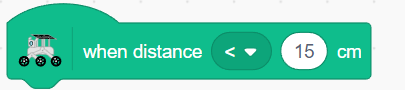
Usa il blocco
when distance < 15 cmper rilevare ostacoli vicini.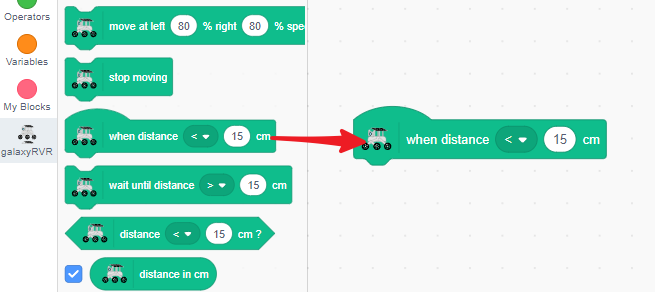
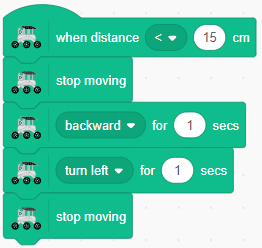
Quando qualcosa si avvicina troppo, fai fermare il rover e indietreggiare.
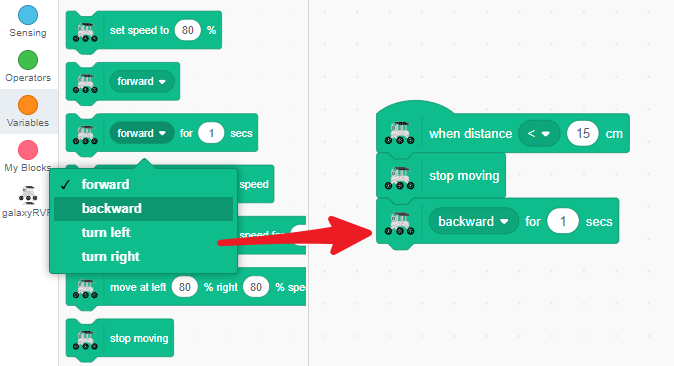
Poi fallo girare leggermente (a sinistra o a destra - a tua scelta!).
Infine, digli di andare di nuovo avanti sul suo nuovo percorso.
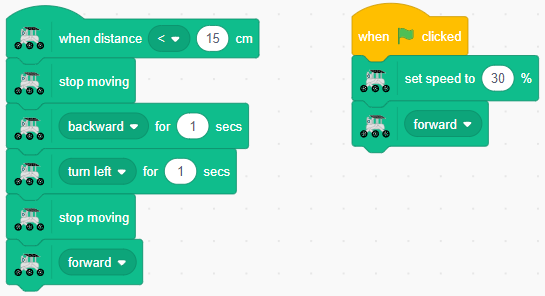
Ora metti il tuo GalaxyRVR sul pavimento e guardalo andare! Avanzera” fino a quando rileva un ostacolo, poi cambiera” intelligentemente direzione e continuera” a esplorare.
Blocchi del sensore a ultrasuoni
Blocco di attivazione evento
Avvia il codice quando un oggetto viene rilevato entro una distanza impostata.
Cambia il simbolo di confronto (< o >)
Regola la soglia di distanza (in cm)
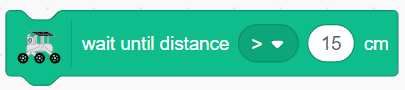
Blocco attendi fino a
Mette in pausa il programma fino a quando il sensore rileva un oggetto alla distanza specificata.
Scegli < o > per il confronto della distanza
Imposta il valore di distanza desiderato
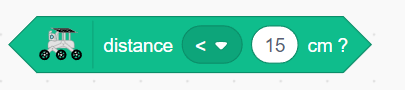
Blocco di controllo condizione
Restituisce VERO o FALSO in base al rilevamento della distanza. Perfetto per l’uso con le istruzioni
if.Passa tra < e > secondo necessità
Imposta il limite di distanza
Blocco valore distanza
Mostra la lettura corrente della distanza dal sensore a ultrasuoni in centimetri.