Nota
Ciao, benvenuto nella community SunFounder per appassionati di Raspberry Pi, Arduino e ESP32 su Facebook! Approfondisci la tua conoscenza di Raspberry Pi, Arduino e ESP32 con altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e anteprime.
Sconti speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca [qui] e unisciti oggi!
Lezione 11: Controllare l’inclinazione della fotocamera del tuo Rover
Dai al tuo Mars Rover una fotocamera mobile! Proprio come puoi annuire con la testa su e giù, il tuo rover ora può inclinare la sua fotocamera per esplorare il paesaggio marziano da diverse angolazioni.
Useremo un motore speciale chiamato «servo» che può muoversi in posizioni esatte - perfetto per controllare l’inclinazione della fotocamera del tuo rover. Impara a programmare il servo per guardare in alto verso le montagne marziane o in basso verso rocce interessanti!
Obiettivi di apprendimento
Scoprire come funziona un servo
Imparare a controllare gli angoli della fotocamera usando semplici blocchi di codice
Creare progetti interattivi che ti permettono di inclinare la fotocamera con controlli touch
Cos’è un servo?
Ecco il servo - il muscolo mobile del tuo robot!
Proprio come puoi muovere il braccio esattamente nella posizione giusta, un servomotore può muoversi ad angoli specifici e mantenerli perfettamente. Pensalo come un motore intelligente che sa esattamente dove fermarsi.

Connessioni semplici:
Cavo marrone: Massa (-)
Cavo rosso: Alimentazione (+)
Cavo arancione: Segnale (dice al servo dove muoversi)
Nel tuo Mars Rover, il servo funge da testa che annuisce - muovendo la fotocamera su e giù per catturare la visuale perfetta!
Come funziona un servo?
All’interno di ogni servo, c’è un team intelligente che lavora insieme:
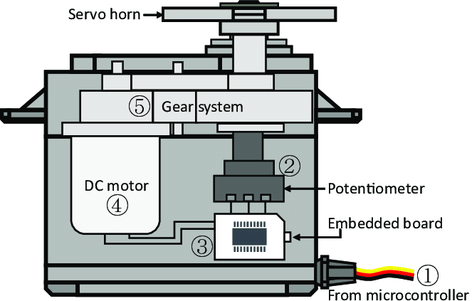
Motore normale - Gira veloce come le ruote del tuo rover
Ingranaggi - Rallentano il movimento e lo rendono più forte
Circuito cervello - Sa esattamente in quale posizione si trova il servo
Sensore di posizione - Riporta dove sta puntando il servo
Controlliamo i servi usando segnali speciali che dicono «muoviti a questo angolo esatto!» È come dire a un amico esattamente quanto girare la testa.
Pronto a far ballare il tuo servo? Iniziamo a programmare!
Controllare il sistema di inclinazione del tuo Rover
Impariamo a controllare il sistema di inclinazione del tuo Mars Rover - la parte che muove la fotocamera su e giù come una testa che annuisce!
Impostazione dell’angolo della fotocamera
Prima, Collegare l’APP al GalaxyRVR.
Controlla l’angolo corrente del servo - lo vedrai visualizzato sullo stage.
Trascina un blocco
set servo angle to 90 degrees. Cliccalo per far guardare il tuo rover in avanti.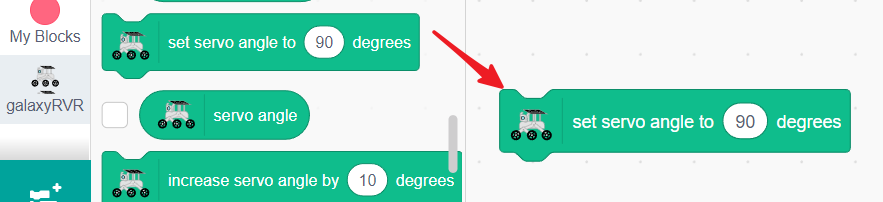
Cambia il valore a 45 e clicca - ora il tuo rover guarda verso il cielo marziano!

Sperimenta con diversi angoli! Scoprirai che il tuo rover può inclinarsi tra 0-135 gradi.
Creazione dei controlli della fotocamera
Costruiamo un pannello di controllo per la fotocamera del tuo rover:
Crea un pulsante di reset - trascina un blocco
when this sprite clicked.
Aggiungi
set servo angle to 90 degreesper far guardare di nuovo la fotocamera in avanti.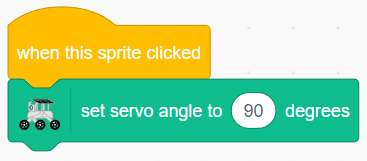
Aggiungi controlli su/giù - trascina i blocchi
when up arrow key pressedewhen down arrow key pressed.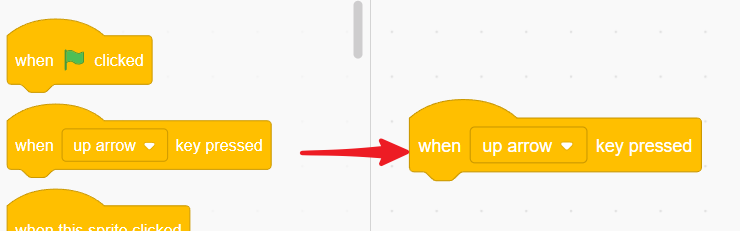
Programma la freccia su per diminuire l’angolo (guarda in alto).
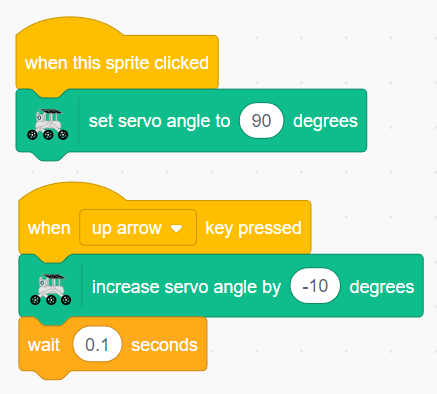
Programma la freccia giù per aumentare l’angolo (guarda in basso).
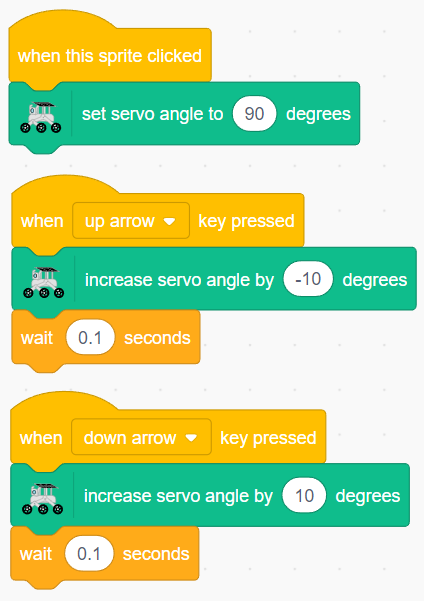
Ora clicca il pulsante a schermo intero e prendi il controllo! Usa i tasti freccia per regolare la visuale del tuo rover e clicca lo sprite per resettare. Sei l’operatore della fotocamera!
Controllo touch per l’angolo della fotocamera
Crea una fotocamera controllata al tocco! Trascina una freccia per puntare la fotocamera del tuo rover esattamente dove vuoi.
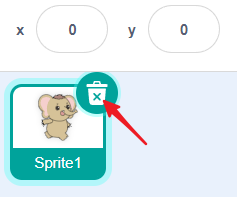
Pulisci lo stage eliminando qualsiasi sprite esistente.
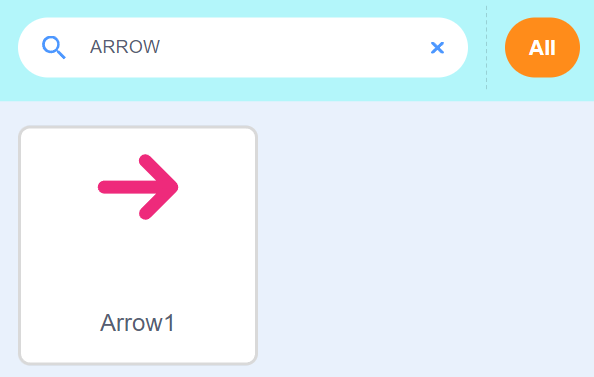
Aggiungi uno sprite Arrow da usare come controller touch.
Inizia con
when this sprite clickedper avviare il controllo touch.
Crea un ciclo che viene eseguito mentre tocchi la freccia.
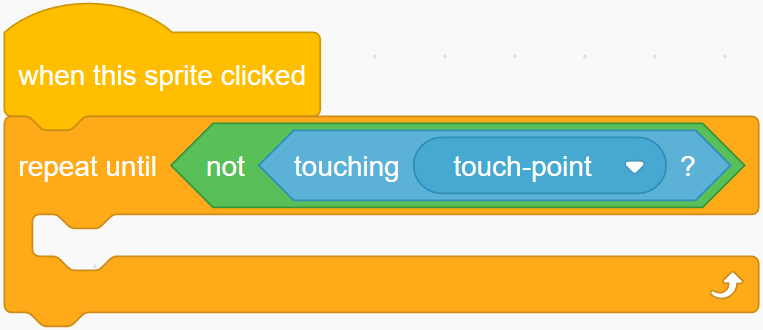
Fai puntare la freccia verso il tuo dito mentre trascini.
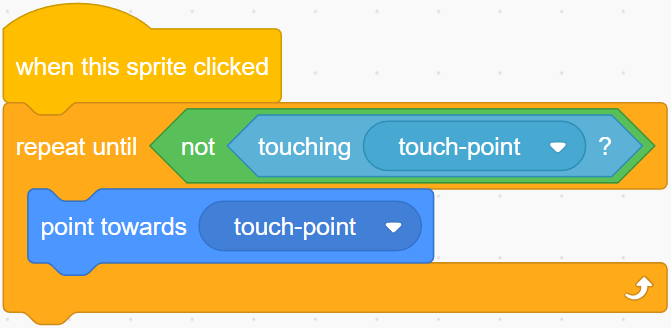
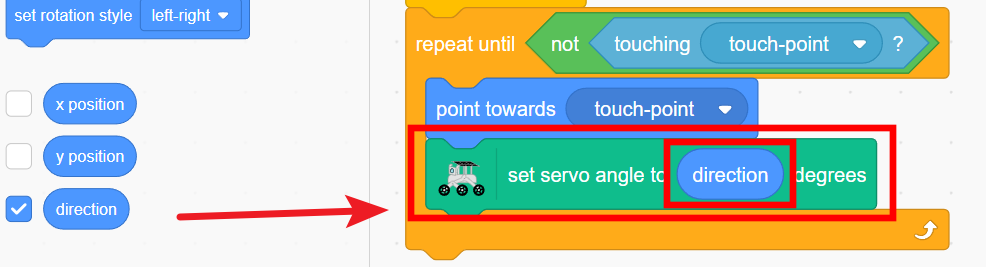
Collega la direzione della freccia all’angolo della fotocamera - ruota la freccia, muovi la fotocamera!
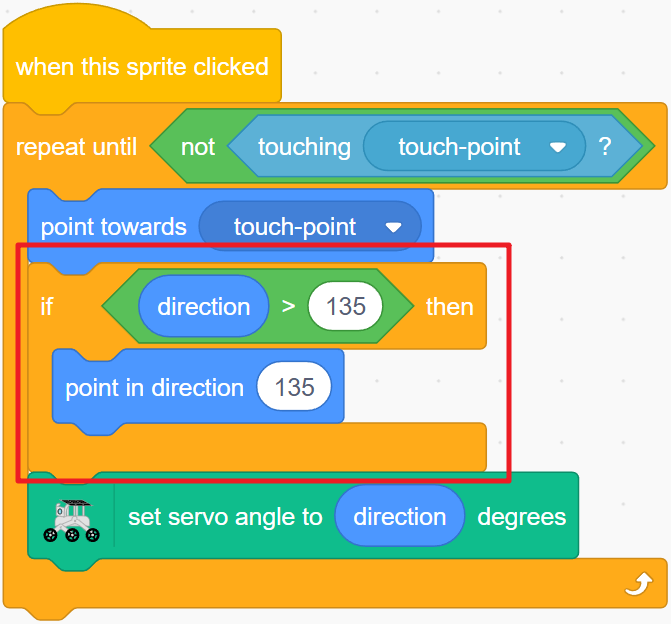
Imposta limiti per mantenere la fotocamera tra 0-135 gradi.
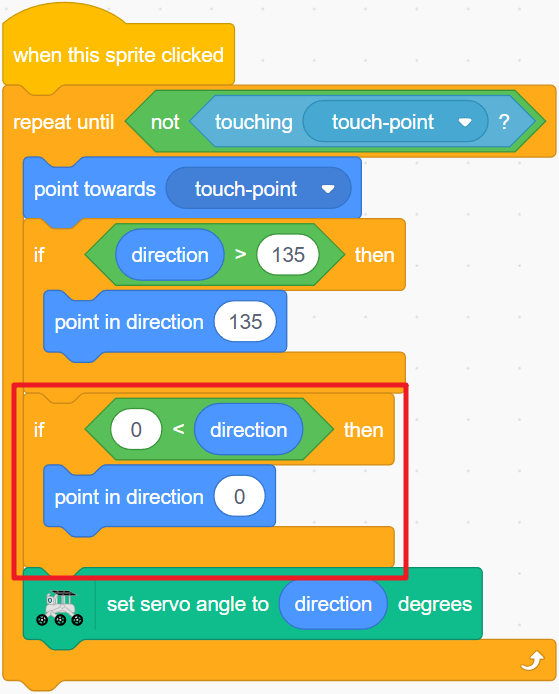
Tocca e trascina la freccia per puntare la fotocamera del tuo rover! Fai muovere la freccia dolcemente e rispondere istantaneamente al tuo tocco per una sensazione di controllo realistica.
Blocchi di controllo servo
Imposta il servo a un angolo specifico (0-135 gradi)

Aumenta o diminuisci l’angolo del servo (usa numeri negativi per diminuire)

Controlla l’angolo corrente del servo
