Nota
Ciao, benvenuto nella community SunFounder per appassionati di Raspberry Pi, Arduino e ESP32 su Facebook! Approfondisci la tua conoscenza di Raspberry Pi, Arduino e ESP32 con altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e anteprime.
Sconti speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca [qui] e unisciti oggi!
Lezione 8: Evitamento ostacoli avanzato
Ti sei mai chiesto come fanno i robot a navigare nelle stanze senza urtare i mobili? Oggi insegneremo al nostro Mars Rover a fare proprio questo! Combineremo due diversi tipi di sensori per creare un sistema di evitamento ostacoli super-intelligente.
Come i sensori aiutano i robot a «vedere»
Pensiamo a come usiamo i nostri sensi:
Sensori a infrarossi funzionano come i pipistrelli che usano l’ecolocalizzazione! Inviano luce infrarossa invisibile e ascoltano il suo rimbalzo dagli oggetti. Se la luce ritorna rapidamente, c’è un ostacolo nelle vicinanze.
Sensori a ultrasuoni funzionano con onde sonore che non possiamo sentire. Inviano suoni ad alta frequenza e misurano quanto tempo impiega l’eco a tornare. Più tempo significa che l’oggetto è più lontano.
Quando usiamo entrambi i sensori insieme, il nostro Rover ottiene una comprensione molto migliore dell’ambiente circostante, proprio come usare sia gli occhi che le orecchie per navigare in una stanza buia!
Obiettivi di apprendimento
Combinare sensori a ultrasuoni e infrarossi per creare un sistema avanzato di evitamento ostacoli
Programmare il tuo Mars Rover per percepire e navigare automaticamente intorno agli ostacoli
Costruire il nostro Rover super-intelligente
Ricordi il programma di evitamento ostacoli che abbiamo creato prima? Lo useremo come punto di partenza e lo renderemo ancora migliore!
Prima, Collegare l’APP al GalaxyRVR.
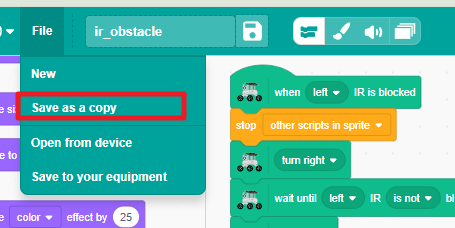
Ora, apriamo il nostro precedente progetto con sensori a infrarossi da Lezione 6: Ostacoli IR come modello. Clicca su «File» e trova il tuo progetto salvato di evitamento ostacoli IR.
Prima di fare modifiche, salviamo una copia per non perdere il nostro lavoro originale. Clicca «Save as a copy».
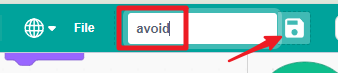
Dai al tuo nuovo progetto un nome interessante come «Super Smart Rover» o «Advanced Obstacle Avoidance».
Ora aggiungiamo il nostro sensore a ultrasuoni! Trascina il blocco
when distance < 15 cm. Questo sarà il nostro «sistema di allarme precoce» che rileva gli ostacoli da più lontano.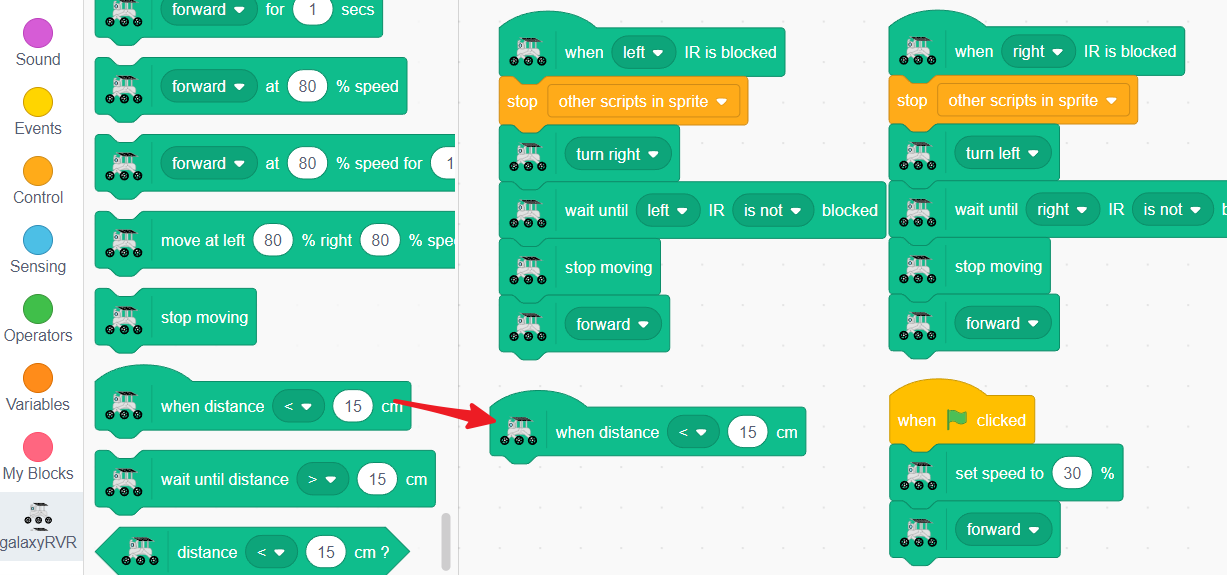
Per evitare confusione, aggiungeremo un blocco
stop other scripts in sprite. Questo assicura che il nostro Rover segua solo un set di istruzioni alla volta.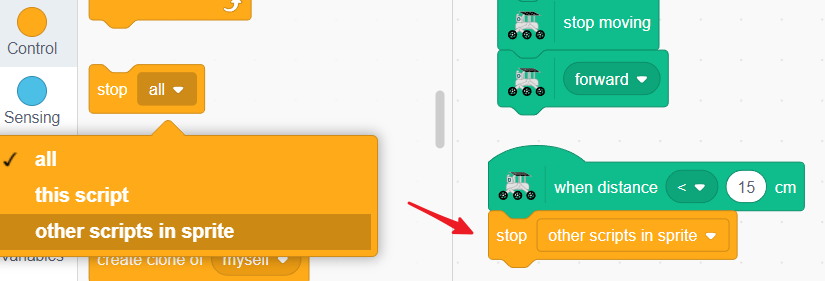
Quando il sensore a ultrasuoni rileva qualcosa di vicino, vogliamo che il nostro Rover indietreggi fino a una distanza di sicurezza.
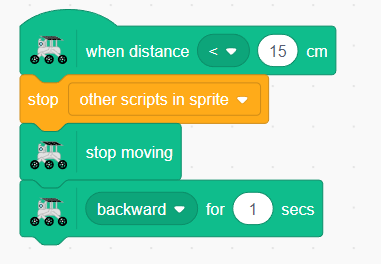
Ora dobbiamo girare lontano dall’ostacolo. Il Rover girerà per un secondo: puoi scegliere se girare a sinistra o a destra!

Infine, diciamo al Rover di continuare ad avanzare sul suo nuovo percorso.

Fantastico! Ora hai un Rover che usa tre sensori che lavorano insieme come una squadra:
Il sensore a ultrasuoni frontale individua gli ostacoli distanti
Il sensore IR sinistro rileva gli oggetti sul lato sinistro
Il sensore IR destro sorveglia il lato destro
Testa il tuo programma e guarda come il tuo Rover naviga agevolmente intorno agli ostacoli. Prova a creare un percorso a ostacoli e vedi se il tuo Rover può completarlo senza incidenti!
Sfida: Puoi modificare il tempo di rotazione o la distanza per rendere il tuo Rover ancora migliore nell’evitare gli ostacoli?