Nota
Ciao, benvenuto nella community SunFounder per appassionati di Raspberry Pi, Arduino e ESP32 su Facebook! Approfondisci la tua conoscenza di Raspberry Pi, Arduino e ESP32 con altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci di nuovi prodotti e anteprime.
Sconti speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Pronto a esplorare e creare con noi? Clicca [qui] e unisciti oggi!
FAQ
1. Perché dovrebbe aggiornare il firmware?
SunFounder migliora continuamente il firmware del GalaxyRVR per offrire un’esperienza migliore. Consigliamo di aggiornare il firmware prima del primo utilizzo per garantire che tutto funzioni correttamente. L’aggiornamento del firmware garantisce:
Correzione di bug: Risolve problemi noti e migliora la stabilità.
Compatibilità delle app: Il firmware più recente è necessario per il corretto funzionamento dell’app RoboPilot e di Mammoth Coding.
Nuove funzionalità: Gli aggiornamenti del firmware possono aggiungere nuove capacità e miglioramenti.
Prestazioni migliori: Ottimizzazioni per la connettività WiFi, lo streaming della fotocamera e il controllo dei motori.
Per istruzioni dettagliate sull’aggiornamento, consultare Aggiornamento Firmware.
Nota
Se preferisce non aggiornare il firmware e desidera continuare a utilizzare la configurazione attuale, può fare riferimento alla Documentazione GalaxyRVR v1.
2. Impossibile connettersi a GalaxyRVR?
Se non riesce a connettersi al GalaxyRVR, controlli quanto segue:
Controlli la batteria: Guardi gli indicatori della batteria sul rover. Se entrambi i LED sono spenti, la batteria è scarica. Carichi il rover utilizzando un cavo USB Type-C.
Controlli l’ESP32 CAM: Si assicuri che l’ESP32 CAM sia correttamente inserito nel suo slot. Se il LED dell’ESP32 CAM non è acceso, il modulo della fotocamera potrebbe non ricevere alimentazione o potrebbe essere danneggiato. L’ESP32 CAM genera l’hotspot WiFi — se non funziona, non apparirà alcuna rete.
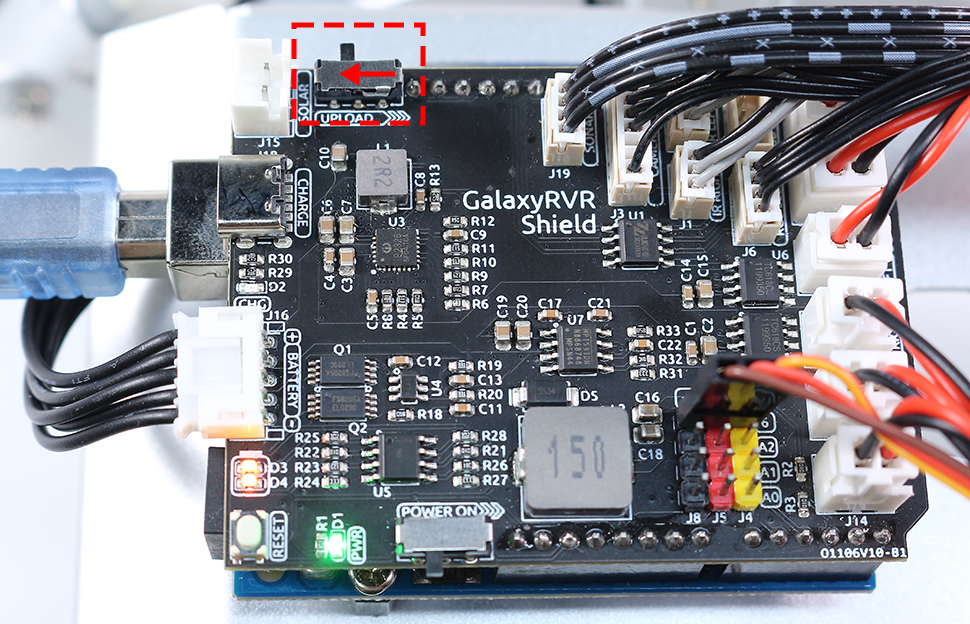
Controlli l’interruttore di modalità: Si assicuri che l’interruttore di modalità sia impostato su Run (non Upload). L’hotspot WiFi funziona solo in modalità Run.
Reimposti la scheda R3: Dopo essere passato alla modalità Run, prema il pulsante Reset sulla scheda R3. La striscia LED inferiore dovrebbe lampeggiare per indicare un avvio corretto.
Controlli la password WiFi: Il nome predefinito dell’hotspot (SSID) è
GalaxyRVRe la password è12345678. Si assicuri di aver inserito la password correttamente.Interferenze WiFi: Altri dispositivi sullo stesso canale WiFi possono causare problemi di connessione. Se sospetta interferenze, provi a cambiare il canale WiFi.
Dopo l’aggiornamento del firmware: Se ha appena aggiornato il firmware dell’ESP32 CAM e il WiFi ha smesso di funzionare, consulti 12. Come ripristinare le impostazioni di fabbrica dell’ESP32 CAM?.
Verifichi la connessione del Suo dispositivo mobile: Se sta utilizzando GalaxyRVR in modalità AP (predefinita), colleghi il Suo dispositivo mobile all’hotspot GalaxyRVR. Se ha configurato una rete WiFi domestica, si assicuri che il Suo dispositivo mobile sia connesso alla stessa rete WiFi domestica.
3. La luce inferiore è arancione fissa e non appare l’hotspot WiFi?
Se la striscia luminosa inferiore del GalaxyRVR mostra una luce arancione fissa e la rete WiFi GalaxyRVR non appare, la causa è una discrepanza di versione del firmware:
Il firmware dell”ESP32 CAM è ancora una versione precedente (1.4.x o 1.3.x)
Il firmware della scheda UNO R3 è stato aggiornato alla versione 2.x
La discrepanza di versione impedisce la comunicazione tra l’ESP32 CAM e l’UNO R3
Per risolvere, segua questi passaggi nell’ordine esatto:
Riporti prima il firmware dell’UNO R3 alla versione 1.x:
Segua la guida nella documentazione v1: GalaxyRVR v1 — Come caricare il codice galaxy-rvr.ino
Aggiorni entrambi i firmware seguendo l’ordine ESP32 CAM → UNO R3:
Segua la guida aggiornata: Aggiornamento Firmware
Nota
L’ordine è importante — aggiorni sempre prima l’ESP32 CAM, poi la scheda R3. Saltare il passaggio di rollback o cambiare l’ordine non risolverà il problema.
4. L’app RoboPilot non riesce a connettersi?
Se l’app RoboPilot non riesce a trovare o connettersi al Suo GalaxyRVR, controlli quanto segue:
Il firmware dell’ESP32 CAM è aggiornato? Un firmware dell’ESP32 CAM obsoleto può causare problemi di connessione. Segua 2. Aggiornamento del Firmware dell’ESP32 CAM per verificare e aggiornare.
Il firmware R3 è aggiornato? La scheda R3 deve avere installato il firmware di comunicazione di fabbrica. Se ha caricato codice Arduino personalizzato, questo sovrascriverà il firmware e interromperà la comunicazione con RoboPilot. Segua 3. Aggiornamento del Firmware della Scheda R3 per ripristinarlo.
L’interruttore di modalità è su Run? L’interruttore di modalità deve essere impostato su Run (non Upload) affinché l’hotspot WiFi funzioni.
Il Suo dispositivo mobile è sulla rete WiFi corretta? Si connetta all’hotspot GalaxyRVR (
GalaxyRVR/12345678) oppure, se ha configurato un WiFi domestico, si connetta a quella stessa rete.Provi a reimpostare: Passi alla modalità Run e prema il pulsante Reset, quindi provi a connettersi di nuovo.
Se nessuno dei suggerimenti precedenti aiuta, provi a cancellare la configurazione dell’ESP32 CAM.
5. L’app Mammoth Coding (Scratch) non riesce a connettersi?
Se Mammoth Coding non riesce a connettersi al Suo GalaxyRVR, controlli quanto segue:
Il firmware dell’ESP32 CAM è aggiornato? L’ESP32 CAM gestisce la connessione WiFi su cui si basa Mammoth Coding. Segua 2. Aggiornamento del Firmware dell’ESP32 CAM per assicurarsi che sia aggiornato.
Il firmware R3 è aggiornato? Mammoth Coding richiede il firmware di comunicazione di fabbrica sulla scheda R3. Se ha caricato il Suo codice Arduino, il firmware di comunicazione viene sovrascritto. Segua 3. Aggiornamento del Firmware della Scheda R3 per ripristinarlo.
L’interruttore di modalità è su Run? L’interruttore di modalità deve essere impostato su Run affinché l’hotspot WiFi sia attivo.
Il Suo dispositivo mobile è sulla rete WiFi corretta? Si assicuri che il Suo dispositivo sia connesso all’hotspot GalaxyRVR o alla stessa rete WiFi domestica configurata sul rover.
Nota
Se desidera utilizzare sia la programmazione Arduino che Mammoth Coding, tenga presente che dovrà ricaricare il firmware R3 ogni volta che passa da una all’altra.
6. Errore di compilazione: SoftPWM.h o SunFounder_AI_Camera.h: File o directory non esistente?
Se riceve un messaggio «Errore di compilazione: SoftPWM.h: File o directory non esistente», significa che la libreria SoftPWM non è installata.
Installi le due librerie richieste SoftPWM e SunFounder AI Camera come mostrato.
Per la libreria SunFounder AI Camera, deve selezionare «INSTALL ALL» per installare contemporaneamente la dipendenza richiesta ArduinoJson.

7. avrdude: stk500_getsync() tentativo 10 di 10: non in sync: resp=0x6e?
Se il seguente messaggio continua ad apparire dopo aver cliccato il pulsante Upload quando la scheda e la porta sono state selezionate correttamente.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x00
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0x00
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0x00
A questo punto, deve assicurarsi che l’ESP32 CAM sia scollegato.
L’ESP32-CAM e la scheda Arduino condividono gli stessi pin RX (ricezione) e TX (trasmissione). Quindi, prima di caricare il codice, deve prima scollegare l’ESP32-CAM per evitare conflitti o potenziali problemi.

Dopo che il codice è stato caricato con successo, se deve utilizzare l’ESP32 CAM, deve spostare l’interruttore a sinistra per avviare l’ESP32 CAM.
8. Come cambiare il canale WiFi?
La banda WiFi a 2,4 GHz ha canali che vanno da 1 a 13. L’ESP32 supporta i canali da 1 a 11. Altri dispositivi che operano sullo stesso canale possono causare interferenze, portando a problemi di connessione. Per mitigare questo problema, può provare a cambiare canale. Per impostazione predefinita, il canale è impostato su 1. Quando seleziona un nuovo canale, si consiglia di saltare 1-2 canali alla volta. Ad esempio, se il canale attuale è 1, provi prima il canale 3 e, se il segnale è ancora debole, passi al canale 5.
Accenda il GalaxyRVR. Per attivare l’ESP32 CAM, sposti l’interruttore di modalità in posizione Run e prema il pulsante reset per riavviare la scheda R3.
Colleghi il Suo dispositivo mobile alla rete WiFi del GalaxyRVR.
Il nome della rete (SSID) è
GalaxyRVRe la password è12345678.Se vede un avviso che indica «Nessun accesso a Internet», scelga l’opzione «Resta connesso».

Apra un browser web sul Suo dispositivo mobile e vada all’indirizzo
http://192.168.4.1. Verrà indirizzato al portale di aggiornamento del firmware ESP32-CAM.
Nella pagina AP, selezioni un canale diverso.
Il canale predefinito è 1. Quando seleziona un nuovo canale, salti 1-2 canali alla volta (ad esempio, dal canale 1 al 3 e, se necessario, al 5).
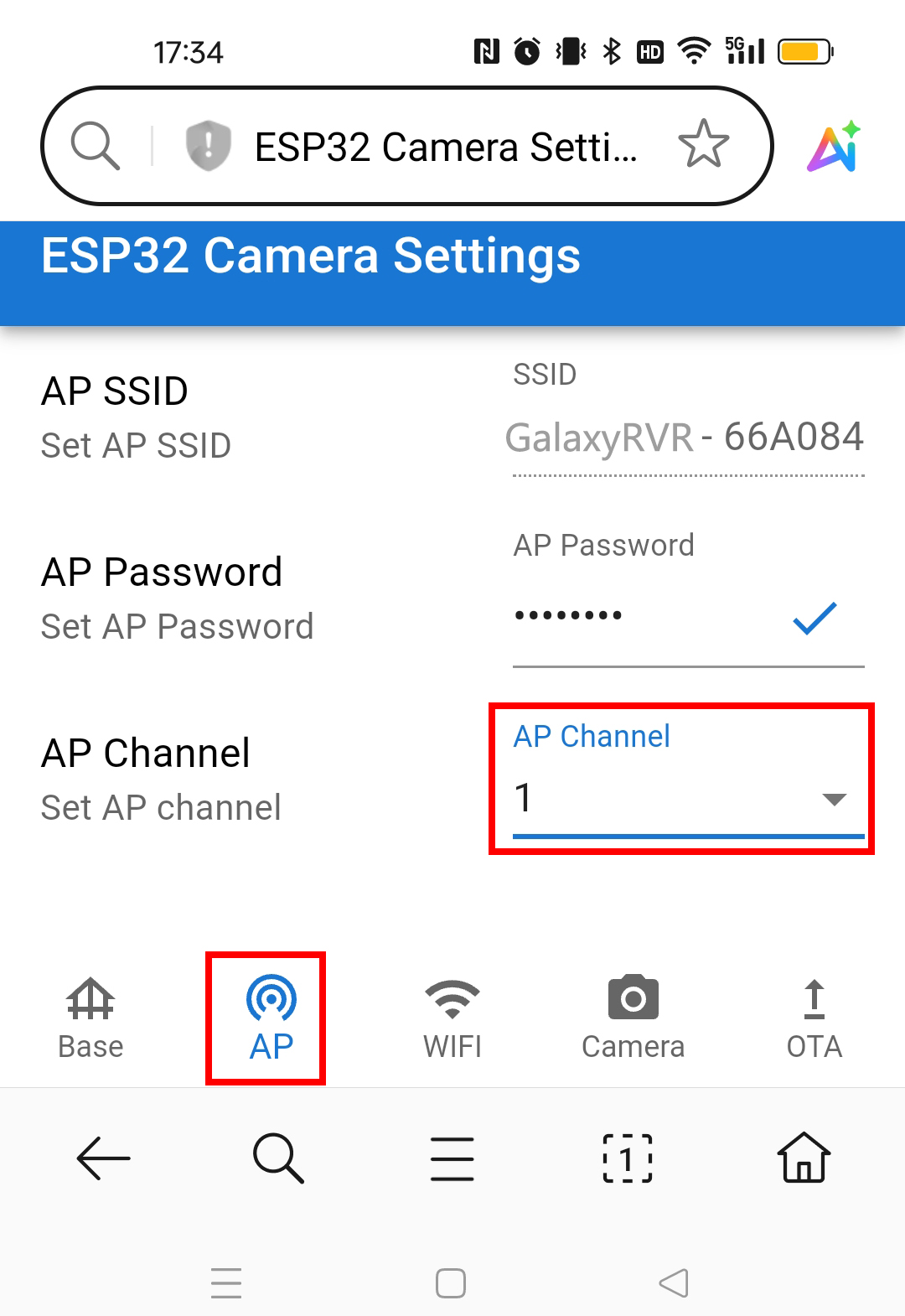
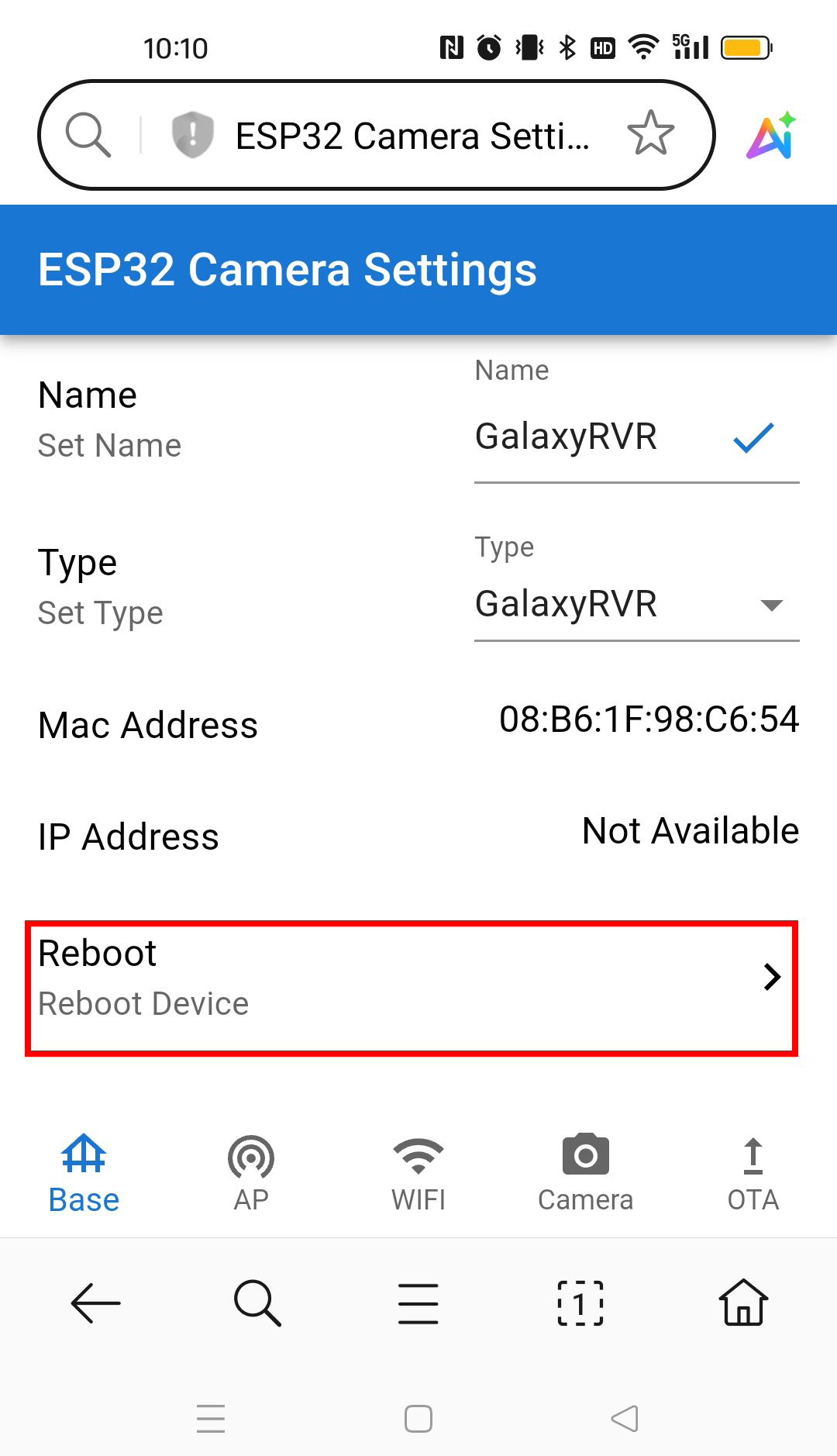
Torni alla pagina Base e clicchi il pulsante Reboot per riavviare il GalaxyRVR. Il GalaxyRVR è ora pronto per il normale funzionamento.
9. Come aggiornare il firmware dell’ESP32 CAM
Per garantire la compatibilità delle app e prestazioni ottimali, si assicuri che il firmware dell’ESP32 CAM sia aggiornato.
Per istruzioni dettagliate passo dopo passo, consulti: 2. Aggiornamento del Firmware dell’ESP32 CAM
10. Come ripristinare il firmware R3
La scheda R3 del GalaxyRVR viene fornita con un firmware che supporta sia l’App RoboPilot che Mammoth Coding.
Se ha sovrascritto questo firmware e deve ripristinare la comunicazione, segua 3. Aggiornamento del Firmware della Scheda R3.
11. Come configurare la connessione WiFi
Per impostazione predefinita, GalaxyRVR opera in modalità AP, dove crea il proprio hotspot WiFi a cui altri dispositivi possono connettersi.
Se desidera che GalaxyRVR si connetta alla Sua rete WiFi domestica, segua i passaggi seguenti:
Accenda il GalaxyRVR. Per attivare l’ESP32 CAM, sposti l’interruttore di modalità in posizione Run e prema il pulsante reset per riavviare la scheda R3.
Colleghi il Suo dispositivo mobile alla rete WiFi del GalaxyRVR.
Il nome della rete (SSID) è
GalaxyRVRe la password è12345678.Se vede un avviso che indica «Nessun accesso a Internet», scelga l’opzione «Resta connesso».
Apra un browser web sul Suo dispositivo mobile e vada all’indirizzo
http://192.168.4.1. Verrà indirizzato al portale di aggiornamento del firmware ESP32-CAM.
Nella pagina WiFi, inserisca il nome della Sua rete WiFi domestica (SSID) e la password.
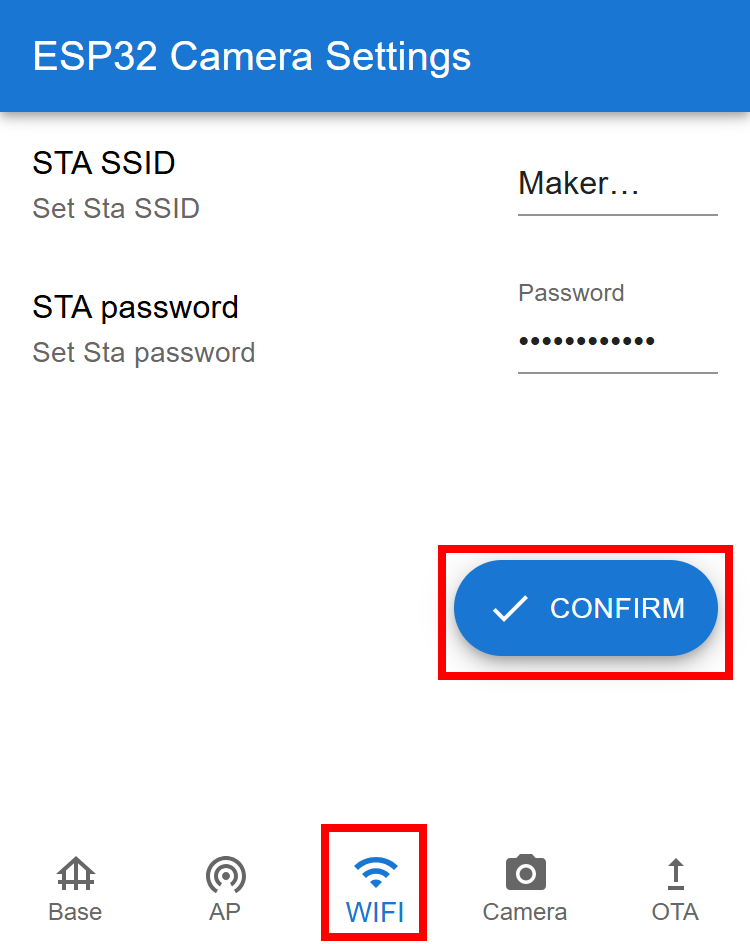
Tocchi il pulsante CONFIRM.
GalaxyRVR tenterà di connettersi alla Sua rete WiFi domestica.
Se la connessione ha successo, l’icona di caricamento si fermerà e apparirà un segno di spunta.
Dopo il riavvio, colleghi il Suo dispositivo mobile alla stessa rete WiFi domestica.
Ora può connettersi a GalaxyRVR tramite l’App RoboPilot o Mammoth Coding.
12. Come ripristinare le impostazioni di fabbrica dell’ESP32 CAM?
Se l’hotspot WiFi del GalaxyRVR non appare o non riesce a connettersi dopo aver aggiornato il firmware dell’ESP32 CAM, i vecchi dati di configurazione WiFi memorizzati nella memoria flash dell’ESP32 CAM potrebbero causare un conflitto.
Per risolvere il problema, deve ripristinare le impostazioni di fabbrica dell’ESP32 CAM cancellando i dati memorizzati. Questa operazione si effettua cortocircuitando i pin IO13 e IO15 sull’ESP32 CAM:
Spenga l’interruttore di alimentazione del GalaxyRVR.
Individui i pin IO13 e IO15 sul modulo ESP32 CAM.
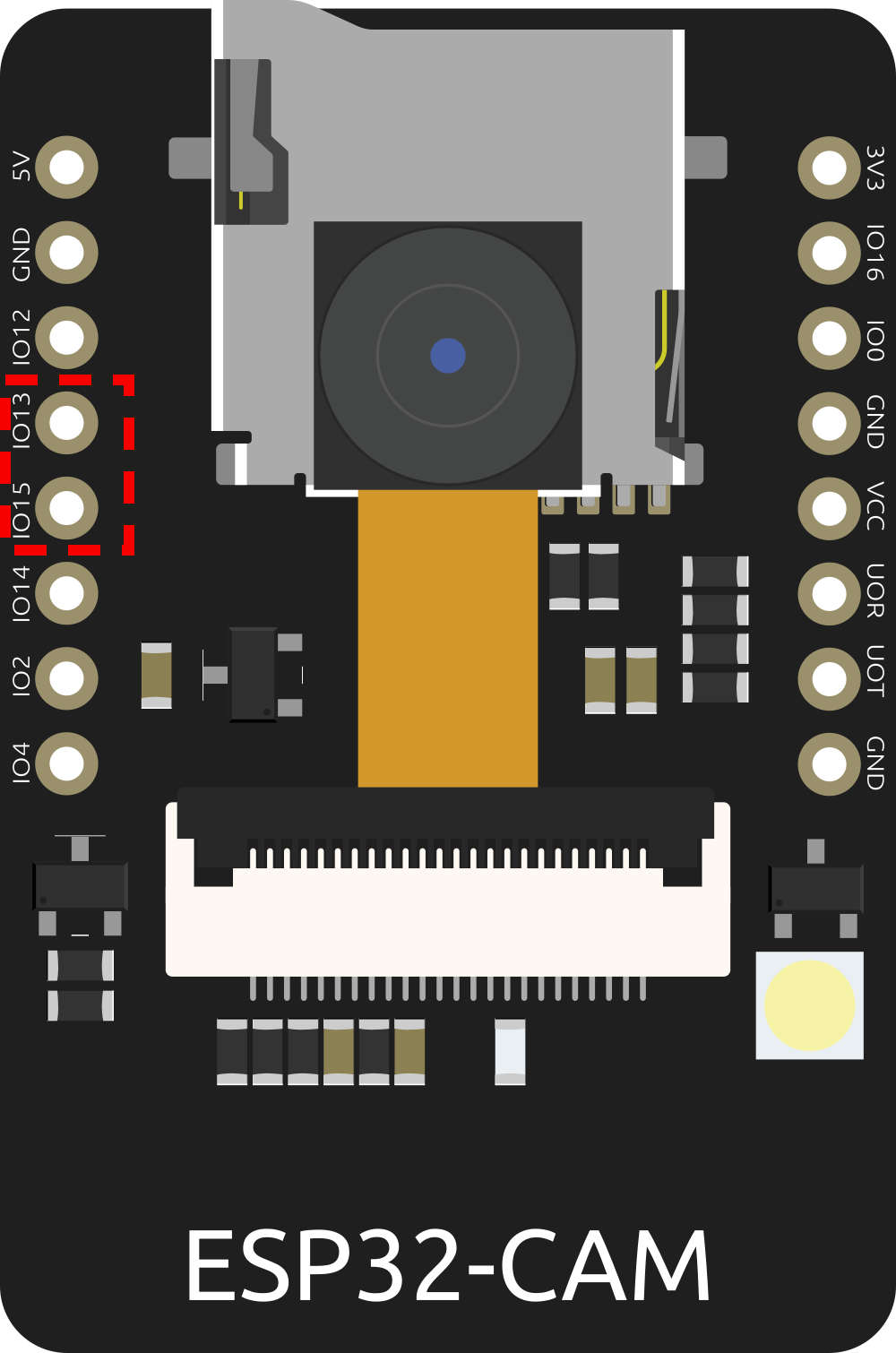
Utilizzi un cavetto jumper o una pinzetta per cortocircuitare (collegare) insieme i pin IO13 e IO15.
Mentre tiene i pin in cortocircuito, accenda l’interruttore di alimentazione del GalaxyRVR.
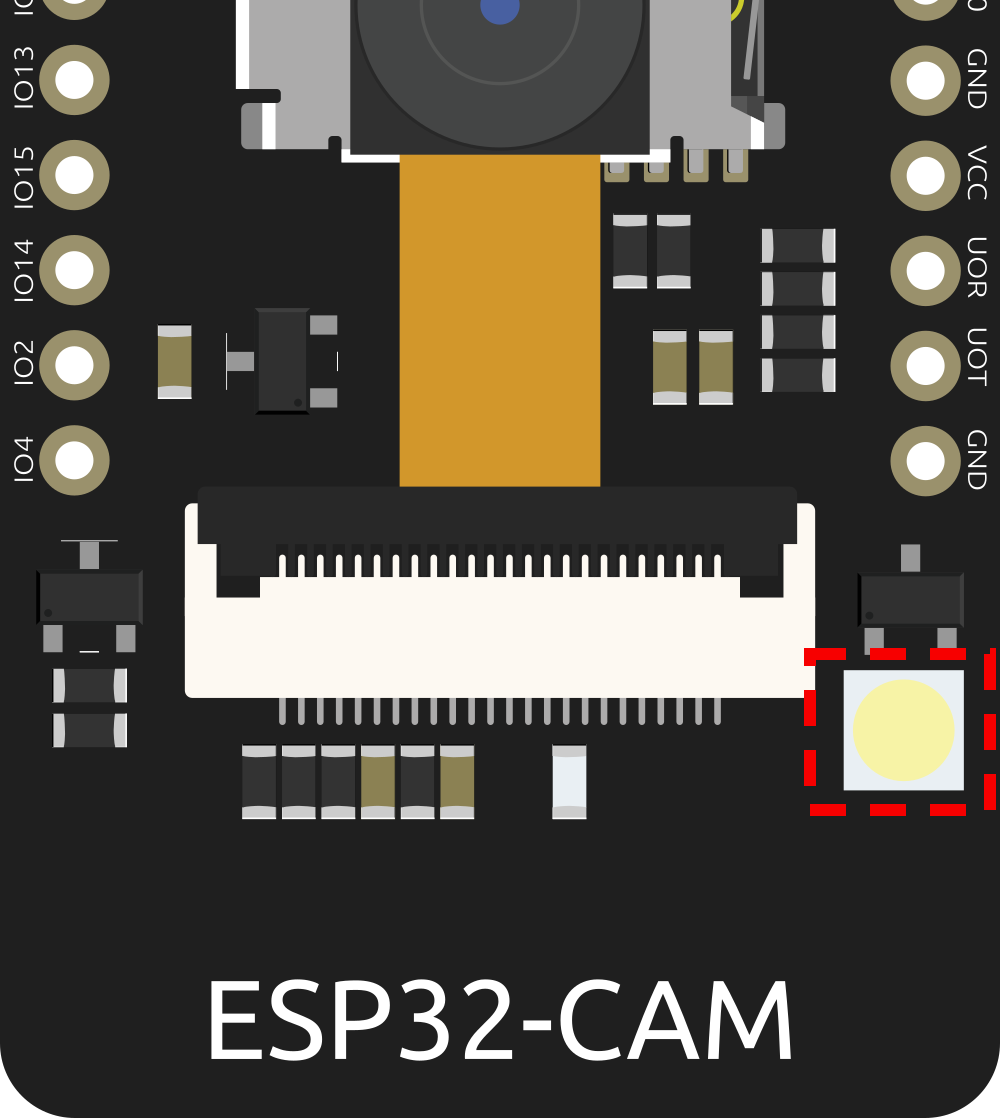
Osservi il LED dell’ESP32 CAM — quando lampeggia due volte rapidamente, rimuova il cavetto jumper.
Porti l’interruttore di modalità su Run e prema il pulsante Reset sulla scheda R3.
L’ESP32 CAM si avvierà ora con la configurazione cancellata. Dovrebbe vedere un hotspot chiamato
AI Camera-xxxxxx(dovexxxxxxè un identificatore univoco) nell’elenco WiFi del Suo dispositivo. Si connetta utilizzando la password12345678.Dopo aver riavviato il GalaxyRVR, il nome dell’hotspot passerà da
AI Camera-xxxxxxaGalaxyRVR-xxxxxx, indicando che le impostazioni di fabbrica sono state ripristinate con successo.
Nota
Dopo aver ripristinato le impostazioni di fabbrica, dovrà riconfigurare eventuali impostazioni WiFi domestiche precedentemente salvate (11. Come configurare la connessione WiFi).