Nota
Ciao, benvenuto nella Community di appassionati di SunFounder Raspberry Pi, Arduino ed ESP32 su Facebook! Approfondisci la tua conoscenza su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci sui nuovi prodotti e alle anteprime esclusive.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e giveaway: Partecipa a giveaway e promozioni speciali per le festività.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
10. Sensore Ultrasonico
In questo progetto imparerai a leggere la distanza rilevata dal modulo ultrasonico.
Come fare?
La ESP32-CAM e la scheda Arduino condividono gli stessi pin RX (ricezione) e TX (trasmissione). Pertanto, prima di caricare il codice, scollega la ESP32-CAM per evitare conflitti o problemi.

Apri il file
10_ultrasonic.inonel percorsozeus-car-main\examples\10_ultrasonic.Dopo aver caricato con successo il codice, sposta l’interruttore di alimentazione su ON per avviare la Zeus Car.
Nota
Non scollegare il cavo USB in questo passaggio, poiché è necessario controllare i dati del modulo ultrasonico sul computer.
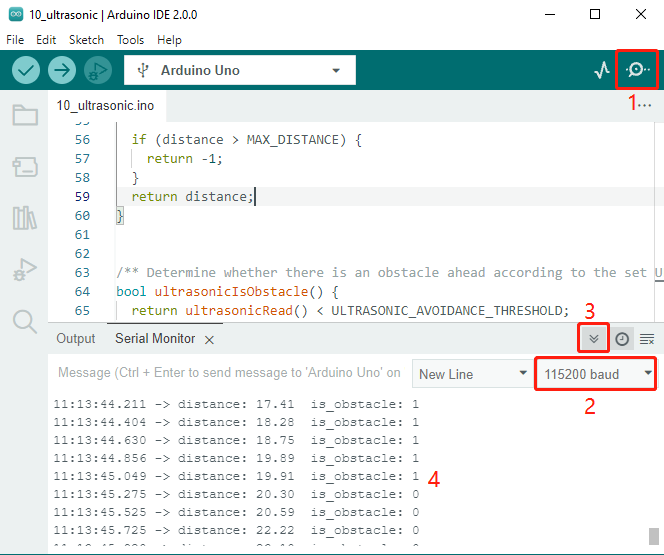
Apri il monitor seriale e assicurati che la velocità di trasmissione (baud rate) sia impostata su 115200. Si consiglia di cliccare sull’icona Toggle Autoscroll per visualizzare sempre i dati più recenti.
Potrai visualizzare i dati stampati in formato
distance: 21.11 is_obstacle: 0.Se un ostacolo viene rilevato entro 20 cm di distanza, il valore
is_obstacle: 0cambierà inis_obstacle: 1.