Nota
Ciao, benvenuto nella Community di appassionati di SunFounder Raspberry Pi, Arduino ed ESP32 su Facebook! Approfondisci la tua conoscenza su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni accesso anticipato agli annunci sui nuovi prodotti e alle anteprime esclusive.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e giveaway: Partecipa a giveaway e promozioni speciali per le festività.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
1. Movimenti di Base
In questo progetto imparerai a far muovere la Zeus Car in tutte le direzioni.
Come fare?
La ESP32-CAM e la scheda Arduino condividono gli stessi pin RX (ricezione) e TX (trasmissione). Pertanto, prima di caricare il codice, scollega la ESP32-CAM per evitare conflitti o problemi.

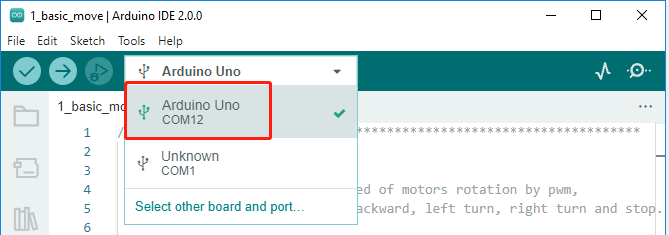
Collega la Zeus Car al computer utilizzando il cavo USB blu. Una volta collegata la scheda Arduino, il computer la riconoscerà automaticamente e le assegnerà una porta COM, visibile in Gestione dispositivi.
Apri il file
1_basic_move.inonel percorsozeus-car-main\examples\1_basic_move.Puoi selezionare rapidamente la scheda e la porta da questa sezione.
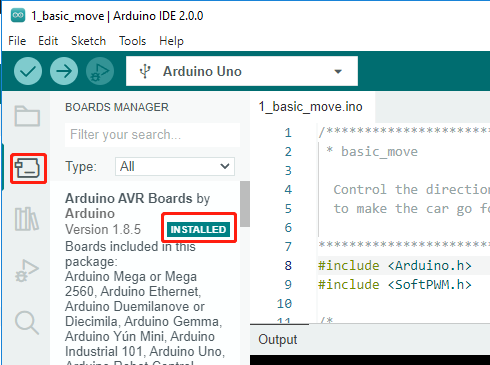
Nota
Se la porta COMxx non appare, apri il Board Manager dalla barra laterale e assicurati che il core «Arduino AVR Boards» sia installato.
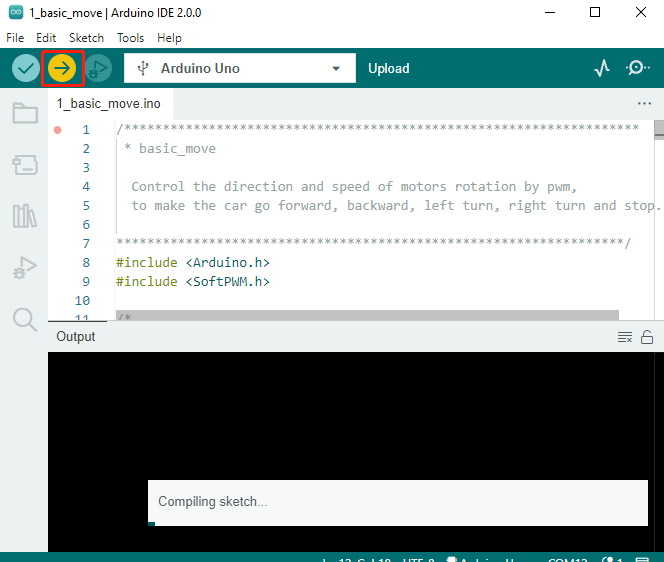
Ora clicca sul pulsante Upload per caricare il codice sulla scheda Arduino. Una volta completato il caricamento, comparirà una notifica nell’angolo in basso a destra della finestra dell’IDE. Se dovessero verificarsi errori, verranno elencati in questa sezione.
Nota
Se ricevi un messaggio di errore «Compilation error: SoftPWM.h: No such file or directory», significa che la libreria
SoftPWMnon è installata.Consulta Installare le librerie richieste per installare le due librerie necessarie
SoftPWMeIRLremote.
Avviamo la Zeus Car.
Quando la Zeus Car viene utilizzata per la prima volta o il cavo della batteria viene scollegato, il circuito di protezione da sovra-scarica dello Shield si attiva.
Per sbloccare questa protezione, collega il cavo Type-C per circa 5 secondi.
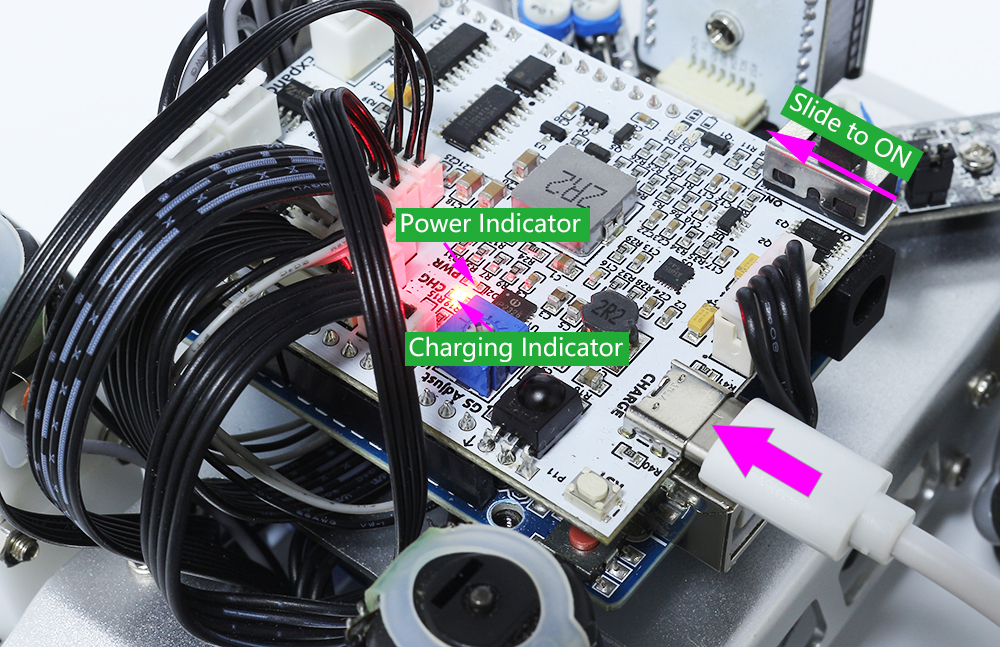
Se l’indicatore di alimentazione si accende, significa che la protezione è stata disattivata. Controlla anche gli indicatori della batteria: se entrambi sono spenti, continua a caricare la batteria collegando il cavo Type-C.

Ora vedrai la Zeus Car muoversi per un secondo in ogni direzione.

Come funziona?
Questi movimenti vengono ottenuti grazie alla combinazione delle quattro ruote Mecanum. Ad esempio, quando tutte e quattro le ruote si muovono avanti o indietro contemporaneamente, la Zeus Car si muove nella stessa direzione. Se due ruote si muovono in avanti e le altre due all’indietro, la Zeus Car eseguirà una traslazione laterale o una rotazione.
Vediamo più nel dettaglio come si realizzano questi movimenti.
Movimento avanti e indietro, traslazione laterale.

Traslazione diagonale.

Rotazione a sinistra e a destra.
