Note
Bonjour et bienvenue dans la communauté des passionnés de SunFounder Raspberry Pi, Arduino et ESP32 sur Facebook ! Plongez au cœur du Raspberry Pi, d’Arduino et de l’ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Obtenez de l’aide pour résoudre vos problèmes après-vente et relevez vos défis techniques grâce à notre communauté et notre équipe.
Apprenez & partagez : Échangez des conseils et tutoriels pour perfectionner vos compétences.
Aperçus exclusifs : Profitez d’un accès anticipé aux annonces de nouveaux produits et à des avant-premières exclusives.
Réductions spéciales : Bénéficiez d’offres exclusives sur nos derniers produits.
Promotions et cadeaux festifs : Participez à des jeux-concours et à des offres spéciales à l’occasion des fêtes.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
10. Ultrason
Dans ce projet, vous apprendrez à lire la distance détectée par le module ultrasonique.
Comment procéder ?
L’ESP32-CAM et la carte Arduino partagent les mêmes broches RX (réception) et TX (transmission). Ainsi, lors du téléversement du code, il est nécessaire de déconnecter l’ESP32-CAM pour éviter tout conflit ou problème potentiel.

Ouvrez le fichier
10_ultrasonic.inositué sous le cheminzeus-car-main\examples\10_ultrasonic.Une fois le code téléversé avec succès, mettez l’interrupteur d’alimentation sur ON pour démarrer la Zeus Car.
Note
Ne débranchez pas l’USB à cette étape, car vous devez vérifier les données du module ultrasonique sur votre ordinateur.
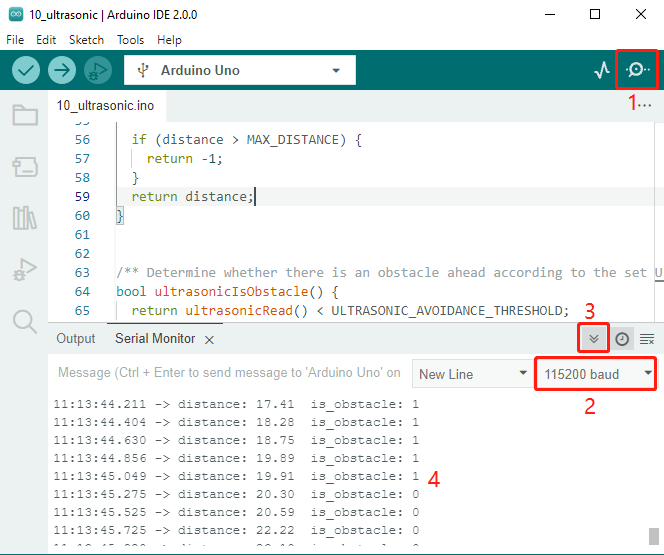
Ouvrez le moniteur série et assurez-vous que le débit en bauds actuel est réglé sur 115200. Il est recommandé de cliquer sur l’icône Toggle Autoscroll afin de toujours voir les dernières données affichées.
Vous devriez voir apparaître des données comme
distance: 21.11 is_obstacle: 0.Si un obstacle se trouve à moins de 20 cm, la valeur
is_obstacle: 0passera àis_obstacle: 1.