Note
Bonjour, bienvenue dans la communauté des passionnés de SunFounder Raspberry Pi, Arduino et ESP32 sur Facebook ! Plongez au cœur du Raspberry Pi, de l’Arduino et de l’ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Obtenez de l’aide pour résoudre vos problèmes après-vente et défis techniques grâce à notre communauté et notre équipe.
Apprenez & partagez : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Profitez d’un accès anticipé aux annonces de nouveaux produits et à des avant-premières.
Réductions spéciales : Bénéficiez d’offres exclusives sur nos derniers produits.
Promotions festives et cadeaux : Participez à nos jeux concours et offres spéciales pour les fêtes.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
2. Déplacement omnidirectionnel
Dans ce projet, vous apprendrez à déplacer la Zeus Car selon les angles suivants : 0°, 45°, 90°, 135°, 180°, 225°, 270° et 315°.
Si l’on ignore les frictions au sol et les tolérances structurelles, la trajectoire suivie devrait être un octogone, ramenant finalement la voiture à son point de départ.
Comment procéder ?
L’ESP32-CAM et la carte Arduino partagent les mêmes broches RX (réception) et TX (transmission). Ainsi, lors du téléversement du code, il est nécessaire de déconnecter l’ESP32-CAM pour éviter tout conflit ou problème potentiel.

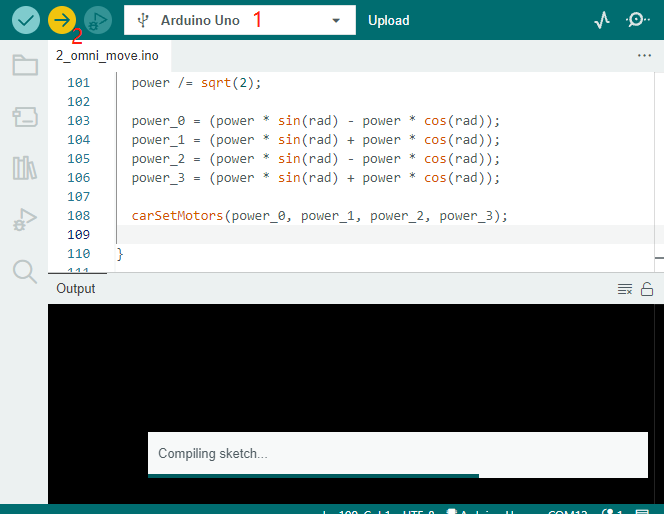
Ouvrez le fichier
2_omni_move.inositué sous le cheminzeus-car-main\examples\2_omni_move.Sélectionnez la carte et le port corrects, puis cliquez sur le bouton Upload.
Note
Si vous obtenez l’erreur « Compilation error: SoftPWM.h: No such file or directory », cela signifie que la bibliothèque
SoftPWMn’est pas installée.Veuillez consulter :ref: ar_install_lib pour installer les deux bibliothèques nécessaires :
SoftPWMetIRLremote.
Basculez l’interrupteur d’alimentation sur ON pour démarrer la Zeus Car.

À ce stade, la Zeus Car se déplacera selon les angles 0°, 45°, 90°, 135°, 180°, 225°, 270° et 315°.
Comment ça fonctionne ?
Le déplacement de la Zeus Car est principalement contrôlé par cette fonction :
void carMove(int16_t angle, int8_t power)
angle: La direction dans laquelle vous souhaitez déplacer la voiture. L’avant du véhicule correspond à 0°, et l’angle augmente dans le sens antihoraire.power: La puissance de déplacement, comprise entre -100 % et 100 %. Lorsquepowerest positif, la voiture avance ; lorsqu’il est négatif, elle recule.