Bemerkung
Hallo und willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Gemeinschaft auf Facebook! Tauchen Sie tiefer ein in die Welt von Raspberry Pi, Arduino und ESP32 mit anderen Enthusiasten.
Warum beitreten?
Expertenunterstützung: Lösen Sie Nachverkaufsprobleme und technische Herausforderungen mit Hilfe unserer Gemeinschaft und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Anleitungen aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezialrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Sind Sie bereit, mit uns zu erkunden und zu erschaffen? Klicken Sie auf [hier] und treten Sie heute bei!
10. Ultraschall
In diesem Projekt lernen Sie, wie Sie die vom Ultraschallmodul erkannte Entfernung ablesen können.
Wie geht das?
ESP32-CAM und das Arduino-Board nutzen dieselben RX (Empfang) und TX (Senden) Pins. Beim Hochladen des Codes sollten Sie daher zunächst den ESP32-CAM trennen, um mögliche Konflikte oder Probleme zu vermeiden.

Öffnen Sie die Datei
10_ultrasonic.inoim Pfadzeus-car-main\examples\10_ultrasonic.Nachdem der Code erfolgreich hochgeladen wurde, schieben Sie den Ein-/Ausschalter auf ON, um das Zeus-Auto zu starten.
Bemerkung
Trennen Sie in diesem Schritt nicht das USB-Kabel, da Sie die Daten des Ultraschallmoduls auf Ihrem Computer überprüfen müssen.
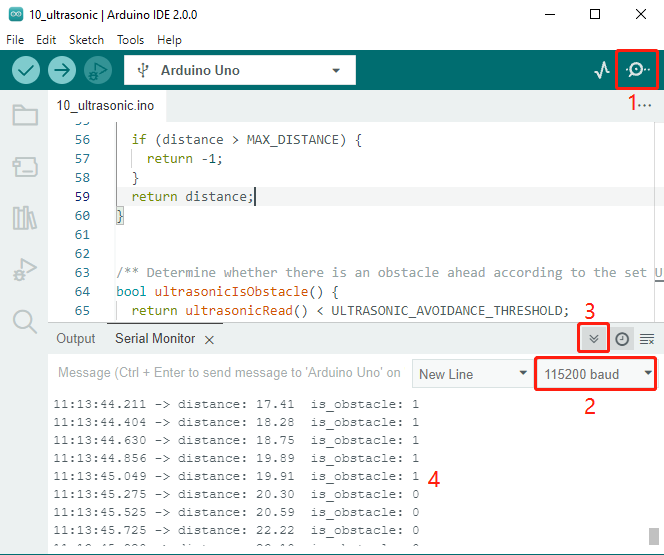
Öffnen Sie den Seriellen Monitor und stellen Sie sicher, dass die aktuelle Baudrate auf 115200 eingestellt ist. Es wird empfohlen, auf das Icon Automatisches Scrollen umschalten zu klicken, damit Sie die neuesten gedruckten Daten sehen können.
Sie können die gedruckten Daten wie
distance: 21.11 is_obstacle: 0anzeigen.Wenn der Abstand des Hindernisses vorne innerhalb von 20 cm liegt, wird
is_obstacle: 0zuis_obstacle: 1wechseln.