Nota
¡Hola! Bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook. Explora más a fondo Raspberry Pi, Arduino y ESP32 junto con otros apasionados.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Acceso exclusivo: Obtén acceso anticipado a anuncios de nuevos productos y adelantos exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy mismo.
9. Sensor de Obstáculos Infrarrojo
En este proyecto, aprenderás a utilizar los módulos de evitación de obstáculos por infrarrojos en ambos lados del Zeus Car.
¿Cómo hacerlo?
La ESP32-CAM y la placa Arduino comparten los mismos pines RX (recepción) y TX (transmisión). Por lo tanto, antes de cargar el código, debes desconectar la ESP32-CAM para evitar conflictos o posibles problemas.

Abre el archivo
9_hc165_and_ir_obstacle.inoen la rutazeus-car-main\examples\9_hc165_and_ir_obstacle.Una vez que el código se haya cargado correctamente, desliza el interruptor de encendido a la posición ON para iniciar el Zeus Car.
Nota
No desconectes el USB en este paso, ya que necesitarás verificar los datos de los dos módulos de evitación de obstáculos en tu computadora.
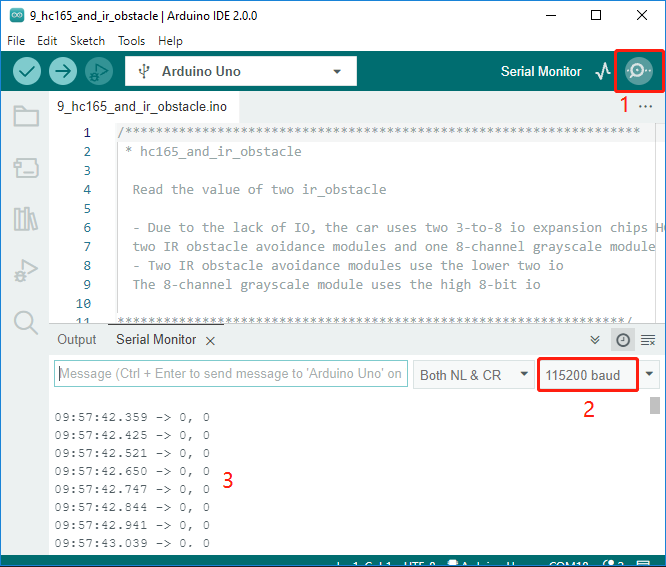
Abre el monitor serie y asegúrate de que la velocidad de transmisión actual esté configurada en 115200, luego podrás visualizar los datos impresos.
Si ninguno de los módulos de evitación de obstáculos detecta un obstáculo, el monitor serie imprimirá
0, 0.Si colocas tu mano frente a uno de los módulos, imprimirá
1, 0o0, 1.
Calibrar el módulo de evitación de obstáculos por infrarrojos.
Comienza ajustando el módulo de evitación de obstáculos derecho. Durante el transporte, los golpes pueden causar que el transmisor y el receptor del módulo de infrarrojos se inclinen. Por lo tanto, es necesario enderezarlos manualmente.
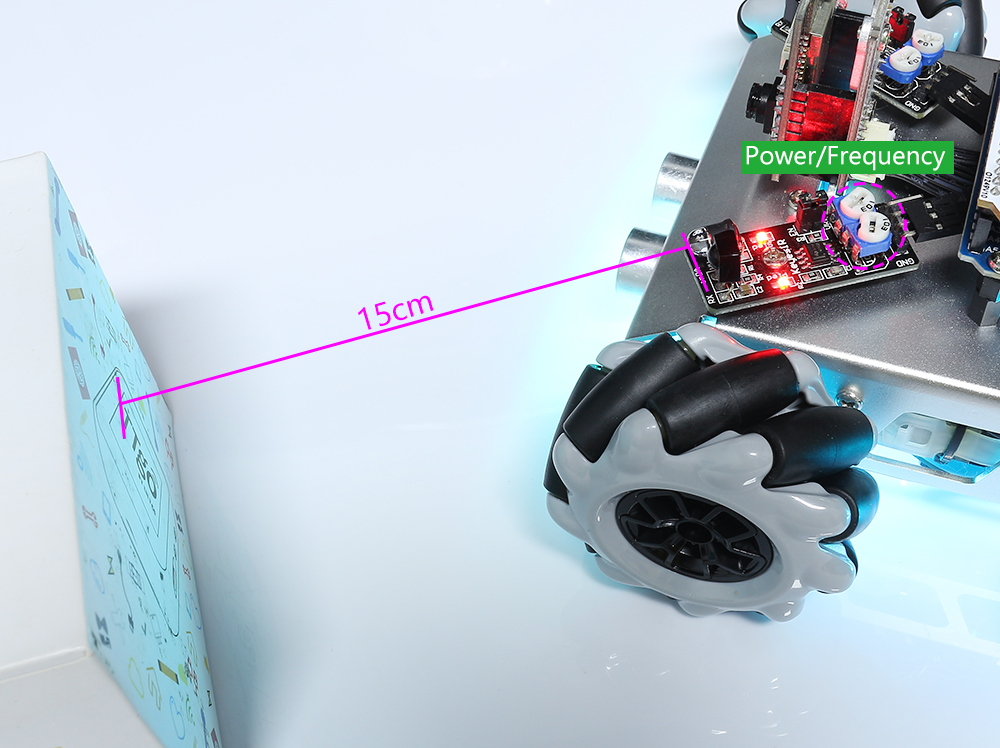
Coloca un obstáculo aproximadamente a 15 cm del módulo de evitación de obstáculos por infrarrojos.
En el módulo hay dos potenciómetros, uno para ajustar la potencia de transmisión y otro para ajustar la frecuencia de transmisión. Ajustando estos potenciómetros, puedes modificar la distancia de detección.
Ajusta uno de los potenciómetros y, si a 15 cm la luz de señal en el módulo se ilumina, la calibración ha sido exitosa. Si no, ajusta el otro potenciómetro.
Calibra el otro módulo de evitación de obstáculos de la misma manera.