Nota
¡Hola! Bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook. Explora más a fondo Raspberry Pi, Arduino y ESP32 junto con otros apasionados.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Acceso exclusivo: Obtén acceso anticipado a anuncios de nuevos productos y adelantos exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy mismo.
11. Evitación de obstáculos
En este proyecto, el Zeus Car avanzará automáticamente y utilizará dos módulos de evitación de obstáculos junto con un módulo ultrasónico para evitar colisiones.
¿Cómo hacerlo?
La ESP32-CAM y la placa Arduino comparten los mismos pines RX (recepción) y TX (transmisión). Por lo tanto, antes de cargar el código, debes desconectar la ESP32-CAM para evitar conflictos o posibles problemas.

Abre el archivo
11_obstacle_avoid.inoen la rutazeus-car-main\examples\11_obstacle_avoid.Una vez que el código se haya cargado correctamente, desliza el interruptor de encendido a la posición ON para iniciar el Zeus Car.
El Zeus Car avanzará automáticamente.
Un módulo ultrasónico detectará los obstáculos al frente; si detecta uno, el coche girará a la izquierda.
Cuando el módulo de evitación de obstáculos izquierdo detecte un obstáculo, el coche girará a la derecha, y cuando el módulo de evitación de obstáculos derecho detecte un obstáculo, el coche girará a la izquierda.
Nota
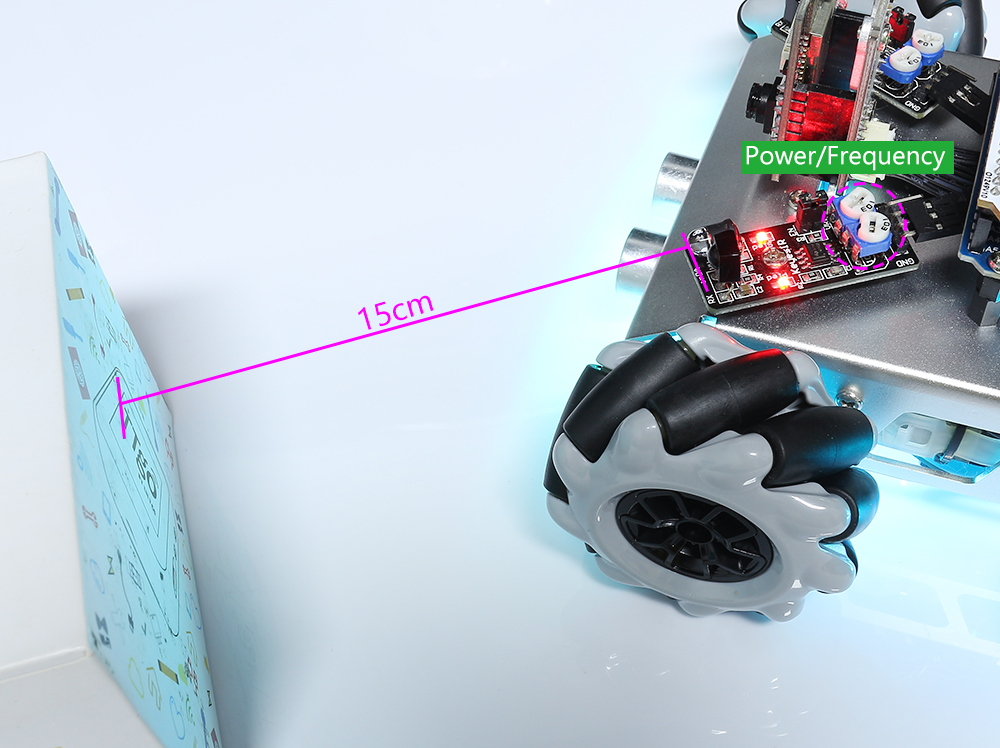
Antes de usarlo, es necesario ajustar la distancia de detección de los dos módulos de evitación de obstáculos a 15 cm. Los pasos son los siguientes:
Primero, ajusta el módulo de evitación de obstáculos derecho. Durante el transporte, los golpes pueden hacer que el transmisor y el receptor del módulo infrarrojo se inclinen. Por lo tanto, debes alinearlos manualmente.
Coloca un obstáculo a unos 15 cm del módulo de evitación de obstáculos por infrarrojos.
En el módulo hay dos potenciómetros: uno para ajustar la potencia de emisión y otro para ajustar la frecuencia de emisión. Ajustando estos potenciómetros, puedes configurar la distancia de detección.
Luego, ajusta un potenciómetro y, si a 15 cm la luz de señal en el módulo se enciende, la calibración será exitosa; si no, ajusta el otro potenciómetro.
Calibra el otro módulo de evitación de obstáculos de la misma manera.