Nota
¡Hola! Bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook. Explora a fondo Raspberry Pi, Arduino y ESP32 junto con otros apasionados.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Acceso exclusivo: Obtén acceso anticipado a anuncios de nuevos productos y adelantos exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy mismo.
10. Ultrasonido
En este proyecto, aprenderás a leer la distancia detectada por el módulo ultrasónico.
¿Cómo hacerlo?
La ESP32-CAM y la placa Arduino comparten los mismos pines RX (recepción) y TX (transmisión). Por lo tanto, antes de cargar el código, primero debes desconectar la ESP32-CAM para evitar conflictos o posibles problemas.

Abre el archivo
10_ultrasonic.inoen la rutazeus-car-main\examples\10_ultrasonic.Una vez que el código se haya cargado correctamente, enciende el interruptor de alimentación para iniciar el Zeus Car.
Nota
No desconectes el USB en este paso, ya que necesitas verificar los datos del módulo ultrasónico en tu computadora.
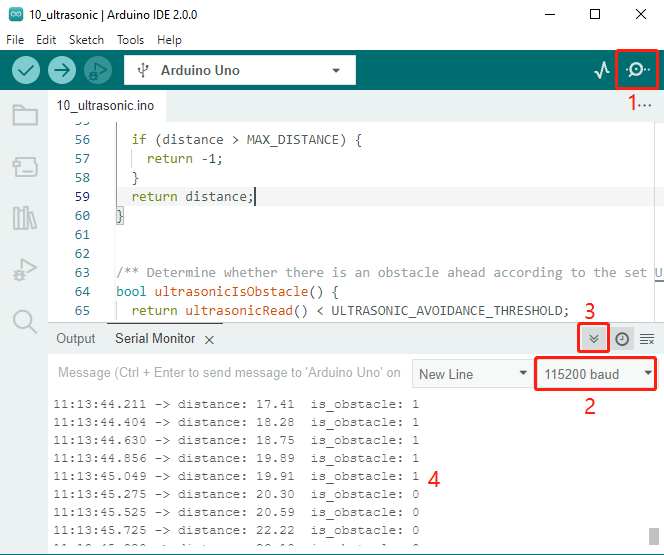
Abre el monitor serie y asegúrate de que la velocidad de baudios actual esté configurada en 115200. Se recomienda hacer clic en el icono Toggle Autoscroll para ver los datos más recientes.
Podrás visualizar los datos impresos como
distance: 21.11 is_obstacle: 0.Si la distancia del obstáculo frente al sensor es inferior a 20 cm,
is_obstacle: 0cambiará ais_obstacle: 1.