Nota
¡Hola! Bienvenido a la comunidad de entusiastas de SunFounder Raspberry Pi, Arduino y ESP32 en Facebook. Explora a fondo Raspberry Pi, Arduino y ESP32 junto con otros apasionados.
¿Por qué unirse?
Soporte experto: Resuelve problemas postventa y desafíos técnicos con ayuda de nuestra comunidad y equipo.
Aprende y comparte: Intercambia consejos y tutoriales para mejorar tus habilidades.
Acceso exclusivo: Obtén acceso anticipado a anuncios de nuevos productos y adelantos exclusivos.
Descuentos especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y sorteos festivos: Participa en sorteos y promociones especiales.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [aquí] y únete hoy mismo.
2. Movimiento Omnidireccional
En este proyecto, aprenderás a mover el Zeus Car en direcciones de 0, 45, 90, 135, 180, 225, 270 y 315 grados.
Si ignoramos la fricción con el suelo y las tolerancias estructurales, su trayectoria debería formar un octágono y eventualmente regresar a su punto de origen.
¿Cómo hacerlo?
La ESP32-CAM y la placa Arduino comparten los mismos pines RX (recepción) y TX (transmisión). Por lo tanto, antes de cargar el código, debes desconectar la ESP32-CAM para evitar conflictos o posibles problemas.

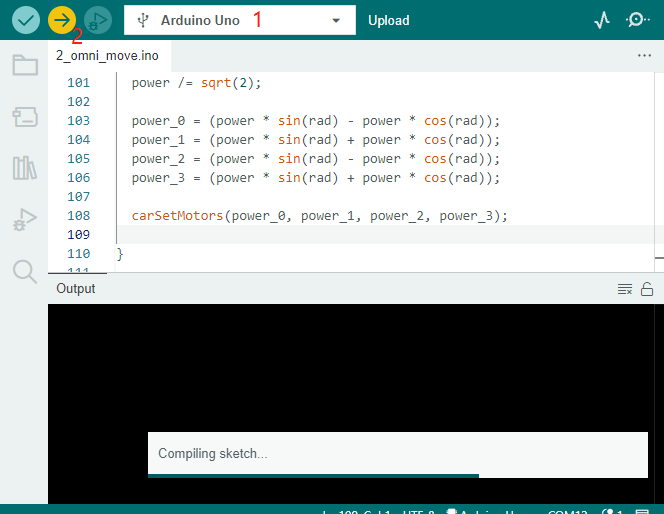
Abre el archivo
2_omni_move.inoubicado en la rutazeus-car-main\examples\2_omni_move.Selecciona la placa y el puerto correctos, luego haz clic en el botón Upload.
Nota
Si aparece el error «Compilation error: SoftPWM.h: No such file or directory», significa que no tienes instalada la biblioteca
SoftPWM.Consulta Instalar las bibliotecas requeridas para instalar las dos bibliotecas necesarias
SoftPWMyIRLremote.
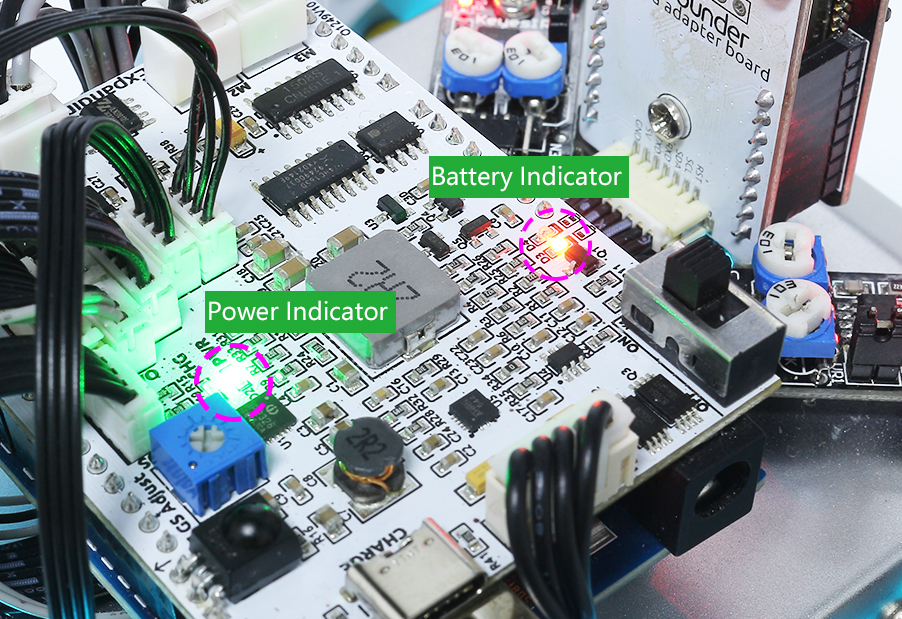
Enciende el interruptor de encendido para iniciar el Zeus Car.
En este punto, el Zeus Car se moverá en las direcciones de 0, 45, 90, 135, 180, 225, 270 y 315 grados.
¿Cómo funciona?
El movimiento del Zeus Car se implementa principalmente mediante esta función:
void carMove(int16_t angle, int8_t power)
angle: La dirección en la que deseas mover el coche. Usa la parte frontal del coche como 0 grados y aumenta el ángulo en dirección antihoraria.power: La potencia de movimiento, con un rango de -100% a 100%. Cuandopoweres positivo, el coche avanza; si es negativo, retrocede.