注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
6.1 - 距離の測定
超音波センサーモジュールは、物体までの距離を決定するために、ソナーおよびレーダーシステムの原理に基づいて動作します。
必要なコンポーネント
このプロジェクトには、以下のコンポーネントが必要です。
全体のキットを購入する方が確実に便利です。リンクはこちら:
名前 |
このキットに含まれるアイテム |
購入リンク |
|---|---|---|
ケプラーキット |
450+ |
以下のリンクから個別にも購入できます。
SN |
コンポーネントの説明 |
数量 |
購入リンク |
|---|---|---|---|
1 |
1 |
||
2 |
マイクロUSBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1 |
回路図
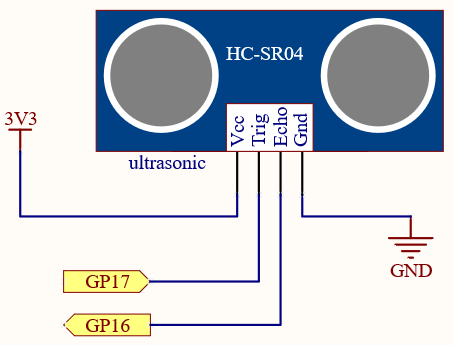
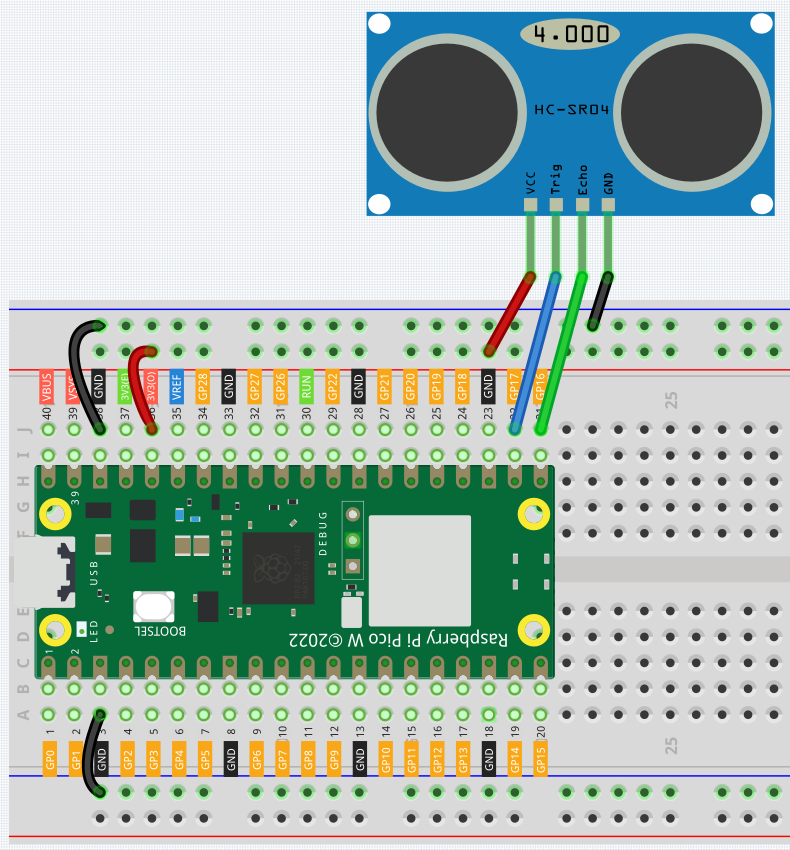
配線
コード
注釈
ファイル
6.1_ultrasonic.inoは、パスkepler-kit-main/arduino/6.1_ultrasonicにあります。または、このコードを Arduino IDE にコピーしてください。
アップロード ボタンをクリックする前に、ボード(Raspberry Pi Pico)と適切なポートを選択してください。
プログラムが動作していると、シリアルモニターには超音波センサーから先の障害物までの距離が表示されます。
動作原理
超音波センサーの適用については、サブ関数を直接確認できます。
float readSensorData(){// ...}
PING は、2マイクロ秒以上のHIGHパルスでトリガーされます。(クリーンな HIGH パルスを確保するために、事前に短い LOW パルスを与えます。)
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
エコーピンは、PINGからの信号を読み取るために使用され、その期間は物体のエコーを受信するまでの時間(マイクロ秒単位)です。
microsecond=pulseIn(echoPin, HIGH);
音速は340 m/s、または1センチメートル当たり29マイクロ秒です。
これは、ピンによって移動した距離、往復を指し、障害物までの距離を得るために2で割ります。
float distance = microsecond / 29.00 / 2;
超音波センサーが動作しているときにプログラムが一時停止することに注意してください。これは、複雑なプロジェクトを作成しているときに遅延を引き起こす可能性があります。