注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.6 - ポンピング
小型の遠心ポンプは、自動植物水やりのプロジェクトに適しています。 また、小さなスマートな水の仕掛けを作るためにも使用できます。
動力源は電動モーターであり、通常のモーターとまったく同じ方法で駆動されます。
注釈
モーターの出口にチューブを接続し、ポンプを水に浸し、電源を入れます。
水位が常にモーターより高いことを確認してください。アイドリングは、発熱と騒音を発生させ、モーターに損傷を与える可能性があります。
植物に水をやる場合、土が吸い込まれないように注意する必要があります。それがポンプを詰まらせる可能性があります。
チューブから水が出ない場合、チューブ内に残留水があり、空気の流れを妨げている可能性があります。まずそれを排水する必要があります。
必要なコンポーネント
このプロジェクトでは、以下のコンポーネントが必要です。
全体のキットを購入すると非常に便利です。以下にリンクを示します:
名前 |
このキットに含まれるアイテム |
購入リンク |
|---|---|---|
ケプラーキット |
450+ |
以下のリンクから個別に購入することもできます。
番号 |
コンポーネント紹介 |
数量 |
購入リンク |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1 |
||
6 |
1 |
||
7 |
パワーパック |
1 |
|
8 |
バッテリーホルダー |
1 |
|
9 |
1 |
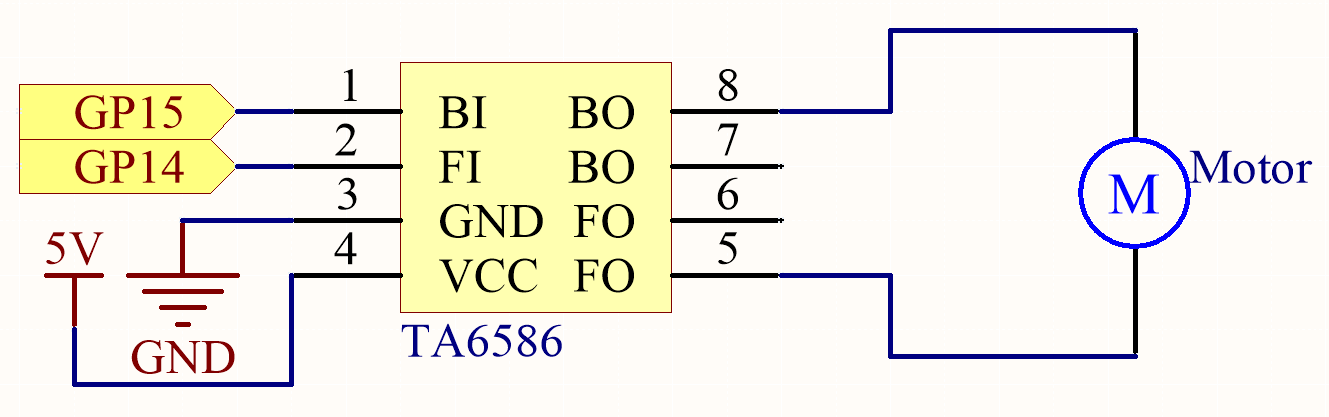
回路図
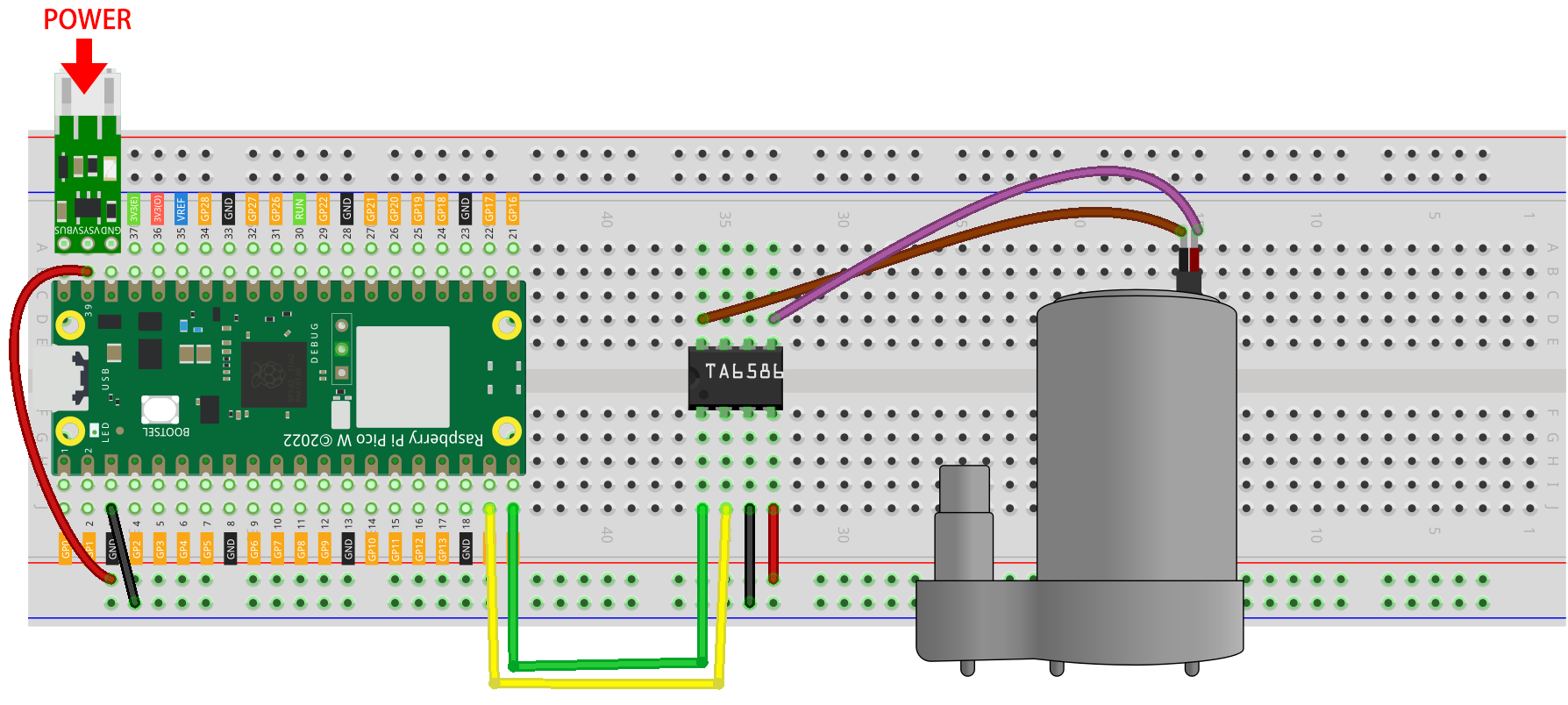
配線
注釈
ポンプは高電流を必要とするため、安全上の理由でここではLi-poチャージャーモジュールを使用してモーターに電力を供給します。
Li-poチャージャーモジュールが図に示されているように接続されていることを確認してください。そうでない場合、短絡が発生し、バッテリーと回路が損傷する可能性があります。
コード
注釈
ファイル
3.6_pumping.inoは、パスkepler-kit-main/arduino/3.6_pumpingの下で開くことができます。または、このコードを Arduino IDE にコピーしてください。
Upload ボタンをクリックする前に、ボード(Raspberry Pi Pico)と正確なポートを選択することを忘れないでください。
コードが実行された後、ポンプが動作を開始し、同時にチューブから水が流れ出ます。
注釈
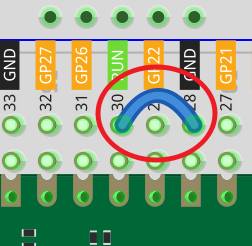
コードを再度アップロードできない場合、この時はPico Wの RUN ピンをGNDにワイヤーで接続してリセットし、その後このワイヤーを抜いてコードを再度実行します。
これは、モーターが過度な電流で動作しているため、Pico Wがコンピュータから切断される可能性があるからです。